说明:
- 本文档由DuRuofu撰写,由DuRuofu负责解释及执行。
- 本文档介绍ESP32的软件定时器。
修订历史:
| 文档名称 | 版本 | 作者 | 时间 | 备注 |
|---|---|---|---|---|
| ESP32系统API-软件定时器 | v1.0.0 | DuRuofu | 2024-03-04 | 首次建立 |
ESP32系统API-软件定时器
一、介绍
本节介绍:高分辨率软件定时器(esp_imer),推荐选择esp_timer定时器作为esp32首选软件定时器。
FreeRTOS提供软件计时器,但这些计时器有一些限制:
- 最大分辨率等于RTOS滴答周期
- FreeRTOS的定时器回调来自于一个低优先级的任务。
硬件定时器不受限制,但配置复杂,只能设置一个比较值(警报值),要灵活使用比较麻烦。
esp_timer定时器有两种工作方式:单次模式/周期模式
二、esp_timer定时器使用
头文件:
#include "esp_timer.h"一、初始化软件定时器
创建定时器句柄:esp_timer_handle_t
创建并配置结构体:
typedef struct {
esp_timer_cb_t callback; //函数在计时器到期的回调函数
void* arg; //传递给回调函数的参数
esp_timer_dispatch_t dispatch_method; //从任务或ISR调用回调
const char* name; //定时名称(字符串)
} esp_timer_create_args_t;使用esp_timer_create创建定时器:
esp_err_t esp_timer_create(const esp_timer_create_args_t* create_args, esp_timer_handle_t* out_handle);参数: create_args :参数,也就是2.1中的变量类型; out_handle:定时器句柄; esp_err_t:返回值,ESP_OK表示创建成功,其他表示失败。
二、启动软件定时器
启动一个周期定时器
esp_err_t esp_timer_start_periodic(esp_timer_handle_t timer, uint64_t period);timer :定时器句柄; period:定时时长,单位是微秒; esp_err_t:返回值,ESP_OK表示创建成功,其他表示失败。
启动一个单次定时器
esp_err_t esp_timer_start_once(esp_timer_handle_t timer, uint64_t timeout_us);timer :定时器句柄; period:定时时长,单位是微秒; esp_err_t:返回值,ESP_OK表示创建成功,其他表示失败。
三、停止和删除软件定时器
停止一个定时器
esp_err_t esp_timer_stop(esp_timer_handle_t timer);既可以用于单词定时器、也可以用于周期定时器。 timer :定时器句柄; esp_err_t:返回值,ESP_OK表示操作成功,其他表示失败。
删除定时器
esp_err_t esp_timer_delete(esp_timer_handle_t timer);timer :定时器句柄; esp_err_t:返回值,ESP_OK表示操作成功,其他表示失败。
三、使用案例
#include <stdio.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_log.h"
#include "esp_timer.h"
static const char *TAG = "esp_timer";
static void periodic_timer_callback(void* arg)
{
int64_t time_since_boot = esp_timer_get_time();
ESP_LOGI(TAG, "Periodic timer called, time since boot: %lld us", time_since_boot);
}
static void oneshot_timer_callback(void* arg)
{
int64_t time_since_boot = esp_timer_get_time();
ESP_LOGI(TAG, "One-shot timer called, time since boot: %lld us", time_since_boot);
}
void app_main(void)
{
// 定义定时器句柄
esp_timer_handle_t oneshot_timer ,periodic_timer;
// 创建一个周期定时器
const esp_timer_create_args_t periodic_timer_args = {
.callback = &periodic_timer_callback,
/* name is optional, but may help identify the timer when debugging */
.name = "periodic"
};//周期定时器配置
ESP_ERROR_CHECK(esp_timer_create(&periodic_timer_args, &periodic_timer));
// 创建一个单次定时器
const esp_timer_create_args_t oneshot_timer_args = {
.callback = &oneshot_timer_callback,
.name = "one-shot"
};//单次定时器配置
ESP_ERROR_CHECK(esp_timer_create(&oneshot_timer_args, &oneshot_timer));
/* Start the timers */
ESP_ERROR_CHECK(esp_timer_start_periodic(periodic_timer, 1000000));//1s回调一次
ESP_ERROR_CHECK(esp_timer_start_once(oneshot_timer, 5000000));//5s后回调
ESP_LOGI(TAG, "Started timers, time since boot: %lld us", esp_timer_get_time());
vTaskDelay(10000 / portTICK_PERIOD_MS); // 10s后删除定时器
/* Clean up and finish the example */
ESP_ERROR_CHECK(esp_timer_stop(periodic_timer));
ESP_ERROR_CHECK(esp_timer_delete(periodic_timer));
ESP_ERROR_CHECK(esp_timer_delete(oneshot_timer));
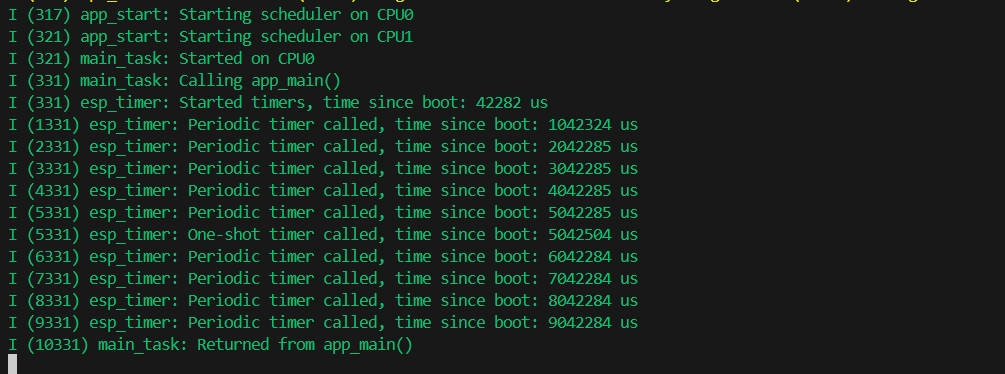
}代码中先定义了两个定时器句柄,一个是周期定时器 (periodic_timer),另一个是单次定时器 (oneshot_timer)。 然后分别使用 esp_timer_create 函数创建这两个定时器,指定了回调函数和名称。 接着使用 esp_timer_start_periodic 函数启动周期定时器,设置了定时器的周期为 1 秒。同时使用 esp_timer_start_once 函数启动单次定时器,设置了定时器在 5 秒后触发。 在主任务函数中,使用了 vTaskDelay 函数延迟了 10 秒,之后停止并删除了这两个定时器。