说明:
- 本文档由DuRuofu撰写,由DuRuofu负责解释及执行。
- 本文档主要介绍使用FPGA实现I2C协议读写AT24C64。
修订历史
| 文档名称 | 版本 | 作者 | 时间 | 备注 |
|---|---|---|---|---|
| FPGA实现I2C协议读写AT24C64 | v1.0.0 | DuRuofu | 2024-02-07 | 首次建立 |
FPGA实现I2C协议读写AT24C64
一、 IIC原理
原理方面不再赘述,可参考:IIC协议解析
二、 硬件设计

AT24C64 的引脚功能如下: A2,A1,A0:可编程地址输入端。 GND:电源地引脚 SDA:SDA(Serial Data,串行数据)是双向串行数据输入/输出端。 SCL:SCL(Serial clock,串行时钟)串行时钟输入端。 WP(写保护):AT24C64 有一个写保护引脚用于提供数据保护,当写保护引脚连接至 GND 时,芯片可以正常写,当写保护引脚连接至 VCC 时,使能写保护功能,此时禁止向芯片写入数据,只能进行读操 作。 VCC:电源输入引脚
开发板原理图:
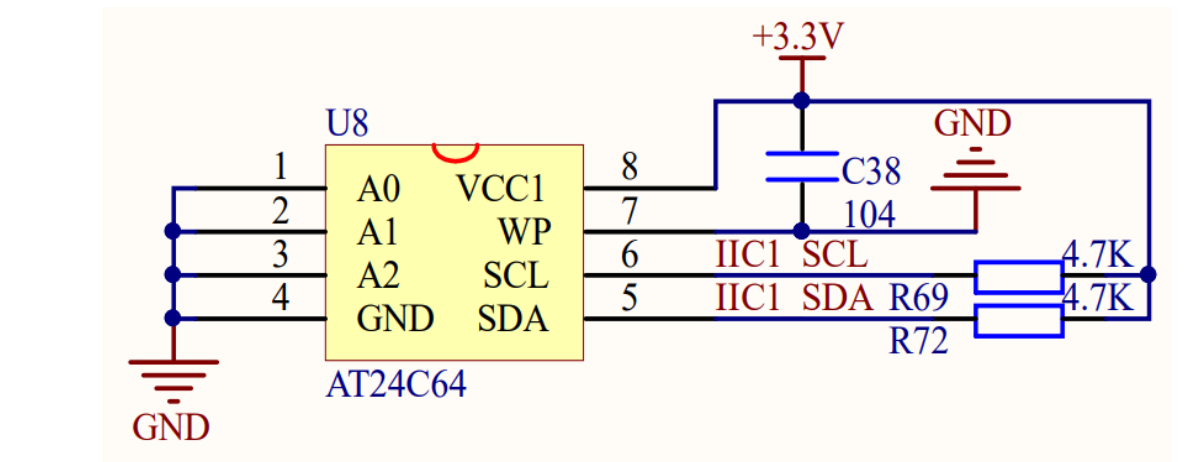
由上图可知,开发板上的 EEPROM 可编程地址 A2、A1、A0 连接到地,所以 AT24C64 的器件地 址为 1010000。
三、程序框图
3.1 顶层模块:

顶层模块输入输出信号简介:
| 信号 | 位宽 | 类型 | 功能描述 |
|---|---|---|---|
| sys_clk | 1Bit | Input | 系统时钟 50MHz |
| sys_rst_n | 1Bit | Input | 复位信号,低有效 |
| key_wr | 1Bit | Input | 写控制按键信号,高有效(1.5V) |
| key_rd | 1Bit | Input | 读控制按键信号,高有效(1.5V) |
| sda | 1Bit | inout | IIC串行数据线 |
| scl | 1Bit | Input | IIC串行时钟线 |
| uart_tx | 1Bit | Input | 串口数据发送 |
3.2 子功能模块:
1、按键消抖模块

| 信号名称 | 位宽 | 类型 | 功能描述 |
|---|---|---|---|
| sys_clk | 1 | Input | 系统时钟 50MHz |
| sys_rst_n | 1 | Input | 复位信号,低有效 |
| key_in | 1 | Input | 按键的输入 |
| key_flag | 1 | output | 去抖后按键被按下的标志信号 |
2、串口发送及缓冲模块

| 信号名称 | 位宽 | 类型 | 功能描述 |
|---|---|---|---|
| sys_clk | 1 | Input | 系统时钟 50MHz |
| sys_rst_n | 1 | Input | 复位信号,低有效 |
| data_in | 8 | Input | 发送数据写入 |
| wr_en | 1 | Input | 发送数据写入使能 |
| tx | 1 | output | 串口输出 |
用于将从eeprom里读出的输入输出到串口
3、IIC控制模块
I2C 驱动模块的主要功能是按照 I2C 协议对 EERPROM 存储芯片执行数据读写操作

I2C 驱动模块输入输出信号简介
| 信号名称 | 位宽 | 类型 | 功能描述 |
|---|---|---|---|
| sys_clk | 1 | Input | 系统时钟 50MHz |
| sys_rst_n | 1 | Input | 复位信号,低有效 |
| wr_en | 1 | Input | 写使能信号 |
| rd_en | 1 | Input | 读使能信号 |
| i2c_start | 1 | Input | 单字节数据读/写开始信号 |
| addr_num | 1 | Input | 数据存储地址字节数标志信号 |
| byte_addr | 16 | Input | 数据存储地址 |
| wr_data | 8 | Input | 待写入 EEPROM 字节数据 |
| i2c_clk | 1 | Output | 工作时钟 |
| i2c_end | 1 | Output | 单字节数据读/写结束信号 |
| rd_data | 8 | Output | 自 EEPROM 中读出的单字节数据 |
| i2c_scl | 1 | Output | I2C 串行时钟信号 SCL |
| i2c_sda | 1 | Output | I2C 串行数据信号 SDA |
I2C 驱动模块包括 13 路输入输出信号,其中输入信号 8 路、输出信号 5 路。输入信号中,sys_clk、sys_rst_n 是必不可少的系统时钟和复位信号; wr_en、rd_en 为 写使能信号,由数据收发模块生成并传入,高电平有效; i2c_start 信号为单字节数据读/写 开始信号;与 i2c_start 信号同时传入的还有数据存储地址 byte_addr 和待写入字节数据 wr_data; 当写使能 wr_en 和 2c_start 信号同时有效,模块执行单字节数据写操作,按照数 据存储地址 byte_addr,向 EEPROM 对应地址写入数据 wr_data; 当读使能信号 rd_en 和 i2c_start 信号同时有效,模块执行单字节数据读操作,按照数据存储地址 byte_addr 读取 EEPROM 对应地址中的数据;
I2C 设备存储地址有单字节和 2 字节两 种,为了应对这一情况,我们向模块输入 addr_num 信号,当信号为低电平时,表示 I2C 设备存储地址为单字节,在进行数据读写操作时只写入数据存储地址 byte_addr 的低 8 位;当 信号为高电平时,表示 I2C 设备存储地址为 2 字节,在进行数据读写操作时要写入数据存 储地址 byte_addr 的全部 16 位。
i2c_clk是本模块的工作时钟,由系统时钟 sys_clk 分频而来,它的时钟 频率为串行时钟 i2c_scl 频率的 4 倍,时钟信号 i2c_clk 要传入数据收发模块(i2c_rw_data)作 为模块的工作时钟;输出给数据收发模块(i2c_rw_data) 的单字节数据读/ 写结束信号 i2c_end,高电平有效,表示一次单字节数据读/写操作完成;rd_data 信号表示自 EEPROM 读出的单字节单字节数据,输出至数据收发模块(i2c_rw_data);i2c_scl、i2c_sda 分别是串 行时钟信号和串行数据信号,由模块产生传入 EEPROM 存储芯片。
4、IIC数据收发模块

数据收发模块的主要功能是:为 I2C 驱动模块提供读/写数据存储地址、待写入数据以 及作为 EEPROM 读出数据缓存,待数据读取完成后将读出数据发送给串口模块进行上位机数据显示。
I2C 数据收发模块输入输出信号简介:
| 信号名称 | 位宽 | 类型 | 功能描述 |
|---|---|---|---|
| sys_clk | 1 | Input | 系统时钟 50MHz |
| i2c_clk | 1 | Input | 模块工作时钟,频率 1MHz |
| sys_rst_n | 1 | Input | 复位信号,低有效 |
| write | 1 | Input | 写触发信号 |
| read | 1 | Input | 读触发信号 |
| i2c_end | 1 | Input | 单字节数据读/写结束信号 |
| rd_data | 8 | Input | EEPROM 读出数据 |
| wr_en | 1 | Output | 写使能信号 |
| rd_en | 1 | Output | 读使能信号 |
| i2c_start | 1 | Output | 单字节数据读/写开始信号 |
| byte_addr | 16 | Output | 读/写数据存储地址 |
| wr_data | 8 | Output | 待写入 EEPROM 数据 |
| fifo_rd_data | 8 | Output | 读取数据 |
3.3 整体框图:

四、逻辑实现
1、按键消抖模块
`timescale 1ns/1ns
// 按键消抖模块
module key_filter
#(
parameter CNT_MAX = 20'd999_999 //计数器计数最大值
)
(
input wire sys_clk , //系统时钟50Mhz
input wire sys_rst_n , //全局复位
input wire key_in , //按键输入信号
output reg key_flag //key_flag为1时表示消抖后检测到按键被按下
//key_flag为0时表示没有检测到按键被按下
);
//********************************************************************//
//****************** Parameter and Internal Signal *******************//
//********************************************************************//
//reg define
reg [19:0] cnt_20ms ; //计数器
//********************************************************************//
//***************************** Main Code ****************************//
//********************************************************************//
//cnt_20ms:如果时钟的上升沿检测到外部按键输入的值为低电平时,计数器开始计数
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_20ms <= 20'b0;
else if(key_in == 1'b1)
cnt_20ms <= 20'b0;
else if(cnt_20ms == CNT_MAX && key_in == 1'b0)
cnt_20ms <= cnt_20ms;
else
cnt_20ms <= cnt_20ms + 1'b1;
//key_flag:当计数满20ms后产生按键有效标志位
//且key_flag在999_999时拉高,维持一个时钟的高电平
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
key_flag <= 1'b0;
else if(cnt_20ms == CNT_MAX - 1'b1)
key_flag <= 1'b1;
else
key_flag <= 1'b0;
endmodule2、串口发送及缓冲模块
串口+ fifo缓冲输出:
`timescale 1ns / 1ns
// 串口输出 + 缓冲
module uart_fifo_tx
#(
parameter UART_BSP = 'd9600, // 波特率
parameter CLK_FREQ = 'd50_000_000 // 时钟频率
)
(
input wire sys_clk,
input wire sys_rst_n,
input wire [7:0] data_in, // 串口输出缓冲区输入数据
input wire wr_en, // 串口输出缓冲区输入数据标志(写入使能)
//output wire empty, // 串口输出缓冲区空标志
//output wire full, // 串口输出缓冲区满标志
output wire tx // 串口发送数据
);
wire [7:0] data_out; // 串口输出数据
wire rd_en;
wire empty;
// 缓冲区非空就使能缓冲区数据读出,并且和串口发送模块的写入使能相连
assign rd_en =!empty;
// 实例化UART发送模块
uart_tx
#(
.UART_BSP(UART_BSP), // 波特率
.CLK_FREQ(CLK_FREQ) // 时钟频率
)
uart_tx
(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.pi_data (data_out),
.pi_flag (wr_en),
.tx (tx)
);
// 实例化UART发送缓冲
dcfifo_uart_1024x8 dcfifo_uart_1024x8_tx (
.rst(~sys_rst_n), // input wire rst
.wr_clk(sys_clk), // input wire wr_clk
.rd_clk(sys_clk), // input wire rd_clk
.din(data_in), // input wire [7 : 0] din
.wr_en(wr_en), // input wire wr_en
.rd_en(rd_en), // input wire rd_en
.dout(data_out), // output wire [7 : 0] dout
.full(), // output wire full
.empty(empty) // output wire empty
);
endmodule串口实现:
`timescale 1ns / 1ns
module uart_tx
#(
parameter UART_BSP = 'd9600, // 波特率
parameter CLK_FREQ = 'd50_000_000 // 时钟频率
)
(
input wire sys_clk, // 系统时钟
input wire sys_rst_n, // 系统复位信号
input wire [7:0] pi_data, // 模块输入数据
input wire pi_flag, // 串口输入数据标志
output reg tx // 数据输出
);
parameter BAUD_CNT__MAX = CLK_FREQ/UART_BSP; // 波特率计数器最大值
reg work_en; // 工作使能
reg [15:0] baud_cnt; // 波特计数器
reg bit_flag; // 数据标志
reg [3:0] bit_cnt; // 比特计数器
// 使能信号
always @(posedge sys_clk or negedge sys_rst_n) begin
if(!sys_rst_n) begin
work_en <= 1'b0;
end
else if(pi_flag == 1'b1) begin
work_en <= 1'b1;
end
else if((bit_cnt == 4'd9) && (bit_flag == 1'b1)) begin
work_en <= 1'b0;
end
else
work_en <= work_en;
end
// 波特计数器
always @(posedge sys_clk or negedge sys_rst_n) begin
if(!sys_rst_n) begin
baud_cnt <= 16'd0;
end
// 归零条件
else if((work_en == 1'b0) || (baud_cnt == BAUD_CNT__MAX - 1'b1)) begin
baud_cnt <= 16'd0;
end
// 计数条件
else if(work_en == 1'b1) begin
baud_cnt <= baud_cnt + 1'b1;
end
else
baud_cnt <= baud_cnt;
end
// 比特标志信号
always @(posedge sys_clk or negedge sys_rst_n) begin
if(!sys_rst_n) begin
bit_flag <= 1'b0;
end
else if(baud_cnt == 16'b1) begin
bit_flag <= 1'b1;
end
else begin
bit_flag <= 1'b0;
end
end
// 比特计数器
always @(posedge sys_clk or negedge sys_rst_n) begin
if(!sys_rst_n) begin
bit_cnt <= 4'd0;
end
// 归零条件
else if((bit_flag == 1'b1) && (bit_cnt == 4'd9)) begin
bit_cnt <= 4'd0;
end
// 计数条件
else if((bit_flag == 1'b1) && (work_en == 1'b1)) begin
bit_cnt <= bit_cnt + 1'b1;
end
else begin
bit_cnt <= bit_cnt;
end
end
// 输出信号
always @(posedge sys_clk or negedge sys_rst_n) begin
if(!sys_rst_n) begin
tx <= 1'b1; //空闲为高
end
else if(bit_flag == 1'b1)begin
case(bit_cnt)
4'd0: tx <= 1'b0; //起始位为低
4'd1: tx <= pi_data[0];
4'd2: tx <= pi_data[1];
4'd3: tx <= pi_data[2];
4'd4: tx <= pi_data[3];
4'd5: tx <= pi_data[4];
4'd6: tx <= pi_data[5];
4'd7: tx <= pi_data[6];
4'd8: tx <= pi_data[7];
4'd9: tx <= 1'b1; //停止位为高
default: tx <= 1'b1;
endcase
end
end
endmodule3、IIC控制模块
3.1 IIC控制模块状态转移图

系统上电后,状态机处于 IDLE(初始状态),接收到有效的单字节数据读/写开始信号 i2c_start 后,状态机跳转到 START_1(起始状态);FPGA 向 EEPROM 存储芯片发送起始信 号;随后状态机跳转到 SEND_D_ADDR(发送器件地址状态),在此状态下向 EEPROM 存 储芯片写入控制指令,控制指令高 7 位为器件地址,最低位为读写控制字,写入“0”,表 示执行写操作;控制指令写入完毕后,状态机跳转到 ACK_1(应答状态)。
在 ACK_1(应答状态)状态下,要根据存储地址字节数进行不同状态的跳转。当 FPGA 接收到 EEPROM 回 传 的 应 答 信 号 且 存 储 地 址 字 节 为 2 字 节 , 状 态 机 跳 转 到 SEND_B_ADDR_H(发送高字节地址状态),将存储地址的高 8 位写入 EEPROM,写入完成 后 , 状 态 机 跳 转 到 ACK_2( 应 答 状 态 ) ;FPGA 接 收 到 应 答 信 号 后 , 状 态 机 跳 转 到 SEND_B_ADDR_L(发送低字节地址状态);当 FPGA 接收到 EEPROM 回传的应答信号且存 储地址字节为单字节,状态机状态机直接跳转到 SEND_B_ADDR_L(发送低字节地址状 态);在此状态低 8 位存储地址或单字节存储地址写入完成后,状态机跳转到 ACK_3(应答 状态)。
在 ACK_3(应答状态)状态下,要根据读/写使能信号做不同的状态跳转。当 FPGA 接收 到应答信号且写使能信号有效,状态机跳转到 WR_DATA(写数据状态);在写数据状态, 向 EEPROM 写入单字节数据后,状态机跳转到 ACK_4(应答状态);待 FPGA 接收到有效应 答信号后,状态机跳转到 STOP(停止状态);当 FPGA 接收到应答信号且读使能信号有效, 状 态 机 跳 转 到 START_2( 起始状态) ; 再 次 向 EEPROM 写 入 起 始 信 号 , 状 态 跳 转 到 SEND_RD_ADDR(发送读控制状态);再次向 EEPROM 写入控制字节,高 7 位器件地址不 变,读写控制位写入“1”,表示进行读操作,控制字节写入完毕后,状态机跳转到 ACK_5(应答状态);待 FPGA 接收到有效应答信号后,状态机跳转到 RD_DATA(读数据状 态);在 RD_DATA(读数据状态)状态,EEPROM 向 FPGA 发送存储地址对应存储单元下的 单字节数据,待数据读取完成户,状态机跳转到 N_ACK(无应答状态),在此状态下向 EEPROM 写入一个时钟的高电平,表示数据读取完成,随后状态机跳转到 STOP(停止状 态)。
在 STOP(停止状态)状态,FPGA 向 EEPROM 发送停止信号,一次单字节数据读/写操 作 完 成 , 随 后 状 态 机 跳 回 IDLE( 初 始 状 态 ), 等 待 下 一 次 单 字 节 数 据 读 /写 开 始 信 号 i2c_start。
3.2 IIC控制模块波形图
计数器分频产生i2c时钟,频率1MHZ:

写数据波形:

读数据波形: 
3.2 IIC控制模块代码实现
1、模块代码:
`timescale 1ns / 1ns
// 按照 I2C 协议对 EERPROM 存储芯片执行数据读写操作
module i2c_ctrl
#(
parameter DEVICE_ADDR = 7'b1010_111, // 设备地址
parameter SYS_CLK_FREQ = 'd50_000_000, // 系统时钟频率
parameter I2C_SCL_FREQ = 'd250_000 // SCL 时钟频率
)
(
input wire sys_clk ,
input wire sys_rst_n,
input wire wr_en, // 写使能
input wire [15:0] byte_addr, // 字节地址
input wire [7:0] wr_data, // 写入数据
input wire rd_en, // 读使能
input wire addr_num, // 地址位数(0:8bit, 1:16bit)
input wire i2c_start, // I2C 开始信号
output reg i2c_scl, // 时钟(250Khz)
inout wire i2c_sda, // 数据
output reg [7:0] rd_data, // 读取的数据
output reg i2c_end, // I2C 结束信号
output reg i2c_clk // I2C 时钟信号(1Mhz)
);
parameter CNT_CLK_MAX = (SYS_CLK_FREQ / I2C_SCL_FREQ) >> 3; // 时钟分频计数器最大值
// I2C 控制状态机状态
parameter IDLE = 4'd00, //初始状态
START_1 = 4'd01, //开始状态 1
SEND_D_ADDR = 4'd02, //设备地址写入状态 + 控制写
ACK_1 = 4'd03, //应答状态 1
SEND_B_ADDR_H = 4'd04, //字节地址高八位写入状态
ACK_2 = 4'd05, //应答状态 2
SEND_B_ADDR_L = 4'd06, //字节地址低八位写入状态
ACK_3 = 4'd07, //应答状态 3
WR_DATA = 4'd08, //写数据状态
ACK_4 = 4'd09, //应答状态 4
START_2 = 4'd10, //开始状态 2
SEND_RD_ADDR = 4'd11, //设备地址写入状态 + 控制读
ACK_5 = 4'd12, //应答状态 5
RD_DATA = 4'd13, //读数据状态
N_ACK = 4'd14, //非应答状态
STOP = 4'd15; //结束状态
reg [7:0] cnt_clk; // 时钟分频计数器
reg [3:0] state; // 状态机状态(二机制码)
reg [1:0] cnt_i2c_clk; // I2C 时钟计数器
reg cnt_i2c_clk_en; // I2C 时钟计数器使能
reg [3:0] cnt_bit; // 位计数器
reg sda_out; // SDA 输出
wire sda_en; // SDA 输出使能
reg ack; // 应答信号
wire sda_in; // SDA 输入
reg [7:0] rd_data_reg; // 读取的数据暂存
//分频计数器(cnt_clk:0~24)
always @(posedge sys_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0) begin
cnt_clk <= 8'd00;
end
else if(cnt_clk == CNT_CLK_MAX - 1) begin
cnt_clk <= 8'd00;
end
else begin
cnt_clk <= cnt_clk + 1'b1;
end
end
// 分频生成 I2C 时钟信号 (i2c_clk:1MHz)
always @(posedge sys_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0) begin
i2c_clk <= 1'b1;
end
// 时钟产生条件
else if(cnt_clk == CNT_CLK_MAX - 1) begin
i2c_clk <= ~i2c_clk;
end
end
// I2C 控制状态机
always @(posedge i2c_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0) begin
state <= IDLE; // 空闲状态
end
else begin
case(state)
IDLE: begin
if (i2c_start == 1'b1)
state <= START_1;
else
state <= state;
end
START_1: begin
if (cnt_i2c_clk == 2'd3)
state <= SEND_D_ADDR;
else
state <= state;
end
SEND_D_ADDR: begin
if ((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd7))
state <= ACK_1;
else
state <= state;
end
ACK_1: begin
if ((cnt_i2c_clk == 2'd3) && (ack == 1'b0)) begin
// 判断地址位数
if (addr_num == 1'b1)
state <= SEND_B_ADDR_H;
else
state <= SEND_B_ADDR_L;
end
else
state <= state;
end
SEND_B_ADDR_H: begin
if ((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd7))
state <= ACK_2;
else
state <= state;
end
ACK_2: begin
if ((cnt_i2c_clk == 2'd3) && (ack == 1'b0))
state <= SEND_B_ADDR_L;
else
state <= state;
end
SEND_B_ADDR_L: begin
if ((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd7))
state <= ACK_3;
else
state <= state;
end
ACK_3: begin
if ((cnt_i2c_clk == 2'd3) && (ack == 1'b0)) begin
if (wr_en == 1'b1)
state <= WR_DATA;
else if (rd_en == 1'b1)
state <= START_2;
else
state <= state;
end
else
state <= state;
end
WR_DATA: begin
if ((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd7))
state <= ACK_4;
else
state <= state;
end
ACK_4: begin
if ((cnt_i2c_clk == 2'd3) && (ack == 1'b0))
state <= STOP;
else
state <= state;
end
START_2: begin
if (cnt_i2c_clk == 2'd3)
state <= SEND_RD_ADDR;
else
state <= state;
end
SEND_RD_ADDR: begin
if ((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd7))
state <= ACK_5;
else
state <= state;
end
ACK_5: begin
if ((cnt_i2c_clk == 2'd3) && (ack == 1'b0))
state <= RD_DATA;
else
state <= state;
end
RD_DATA: begin
if ((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd7))
state <= N_ACK;
else
state <= state;
end
N_ACK: begin
if ((cnt_i2c_clk == 2'd3) && (ack == 1'b0))
state <= STOP;
else
state <= state;
end
STOP: begin
if ((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd3))
state <= IDLE;
else
state <= state;
end
default: begin
state <= IDLE;
end
endcase
end
end
// I2C 时钟计数器
always @(posedge i2c_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0) begin
cnt_i2c_clk <= 2'd0;
end
// 计数条件
else if(cnt_i2c_clk_en == 1'b1) begin
cnt_i2c_clk <= cnt_i2c_clk + 1'b1;
end
end
// I2C 时钟计数器使能
always @(posedge i2c_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0) begin
cnt_i2c_clk_en = 1'b0;
end
// 失能条件
else if((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd3) && (state == STOP)) begin
cnt_i2c_clk_en = 1'b0;
end
// 使能条件
else if(i2c_start == 1'b1) begin
cnt_i2c_clk_en = 1'b1;
end
end
// 位计数器
always @(posedge i2c_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0) begin
cnt_bit <= 3'd0;
end
// 不计数条件
else if((state == IDLE) || (state == START_1) || (state == START_2)|| (state == ACK_1) || (state == ACK_2) || (state == ACK_3) || (state == ACK_4) || (state == ACK_5) || (state == N_ACK)) begin
cnt_bit <= 3'd0;
end
// 清零条件
else if((cnt_i2c_clk == 2'd3) && (cnt_bit == 3'd7)) begin
cnt_bit <= 3'd0;
end
// 计数条件
else if((cnt_i2c_clk == 2'd3) && (state != IDLE)) begin
cnt_bit <= cnt_bit + 1'b1;
end
end
// SDA 输出
always @(*) begin
case(state)
IDLE: begin
sda_out <= 1'b1;
end
START_1: begin
if(cnt_i2c_clk == 2'd0)
sda_out <= 1'b1;
else
sda_out <= 1'b0;
end
SEND_D_ADDR: begin
if(cnt_bit < 3'd6)
sda_out <= DEVICE_ADDR[6 - cnt_bit];
else
sda_out <= 1'b0;
end
ACK_1: begin
sda_out <= 1'b1;
end
SEND_B_ADDR_H: begin
sda_out <= byte_addr[15 - cnt_bit];
end
ACK_2: begin
sda_out <= 1'b1;
end
SEND_B_ADDR_L: begin
sda_out <= byte_addr[7 - cnt_bit];
end
ACK_3: begin
sda_out <= 1'b1;
end
WR_DATA: begin
sda_out <= wr_data[7 - cnt_bit];
end
ACK_4: begin
sda_out <= 1'b1;
end
START_2: begin
if (cnt_i2c_clk <= 2'b1)
sda_out <= 1'b1;
else
sda_out <= 1'b0;
end
SEND_RD_ADDR: begin
if(cnt_bit < 3'd6)
sda_out <= DEVICE_ADDR[6 - cnt_bit];
else
sda_out <= 1'b1;
end
ACK_5: begin
sda_out <= 1'b1;
end
RD_DATA: begin
sda_out <= 1'b1;
end
N_ACK: begin
sda_out <= 1'b1;
end
STOP: begin
if((cnt_bit == 3'd0) && (cnt_i2c_clk <= 2'd3))
sda_out <= 1'b0;
else
sda_out <= 1'b1;
end
default: sda_out <= 1'b1;
endcase
end
// SDA 输出使能
assign sda_en = ((state == RD_DATA) || (state == ACK_1) || (state == ACK_2)|| (state == ACK_3) || (state == ACK_4)|| (state == ACK_5) )? 1'b0 : 1'b1;
// ACK 信号
always @(*) begin
case(state)
ACK_1, ACK_2, ACK_3, ACK_4, ACK_5: begin
if(cnt_i2c_clk == 2'd0)
ack = sda_in;
else
ack = ack;
end
default: ack = 1'b0;
endcase
end
// SDA 输入
assign sda_in = i2c_sda;
always @(*) begin
case(state)
IDLE: begin
rd_data_reg <= 8'b0;
end
RD_DATA: begin
rd_data_reg[7- cnt_bit] <= sda_in;
end
default: rd_data_reg <= rd_data_reg;
endcase
end
// I2C_SCL 输出
always @(*) begin
case(state)
IDLE: begin
i2c_scl <= 1'b1;
end
START_1: begin
if(cnt_i2c_clk == 2'd3)
i2c_scl <= 1'b0;
else
i2c_scl <= 1'b1;
end
SEND_D_ADDR,ACK_1,SEND_B_ADDR_H,ACK_2,ACK_3,WR_DATA,ACK_4,
START_2,SEND_RD_ADDR,ACK_5,RD_DATA,N_ACK:begin
if((cnt_i2c_clk == 2'd1) || (cnt_i2c_clk == 2'd2))
i2c_scl <= 1'b1;
else
i2c_scl <= 1'b0;
end
STOP: begin
if((cnt_bit == 3'd0) && (cnt_i2c_clk <= 2'd0))
i2c_scl <= 1'b0;
else
i2c_scl <= 1'b1;
end
default: i2c_scl <= 1'b1;
endcase
end
// I2C_SDA 输出
assign i2c_sda = (sda_en)? sda_out : 1'b1;
// 结束信号
always @(posedge i2c_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0) begin
i2c_end <= 1'b0;
end
else if((state == STOP) && (cnt_bit == 3'd3) && (cnt_i2c_clk == 2'd3)) begin
i2c_end <= 1'b1;
end
else begin
i2c_end <= 1'b0;
end
end
// 数据输出
always @(posedge i2c_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0) begin
rd_data <= 8'd0;
end
else if((state == RD_DATA) && (cnt_bit == 3'd7) && (cnt_i2c_clk == 2'd3)) begin
rd_data <= rd_data_reg;
end
else begin
rd_data <= rd_data;
end
end
endmodule