Ubuntu_20_04_ROS1安装
说明:
- 本文档由DuRuofu撰写,由DuRuofu负责解释及执行。
- 本文记录在Ubuntu22.04下安装ROS1,仅做记录。
修订历史:
| 文档名称 | 版本 | 作者 | 时间 | 备注 |
|---|---|---|---|---|
| Ubuntu_20_04_ROS1安装 | v1.0.0 | DuRuofu | 2024-03-17 | 首次建立 |
一、安装Ubuntu20.04虚拟机
简单,此处忽略
二、选择ROS版本
进入ROS官网:https://www.ros.org/
这里我们按照ROS1的最后一个版本Noetic Ninjemys
三、参考官方安装步骤
点击查看官方教程:
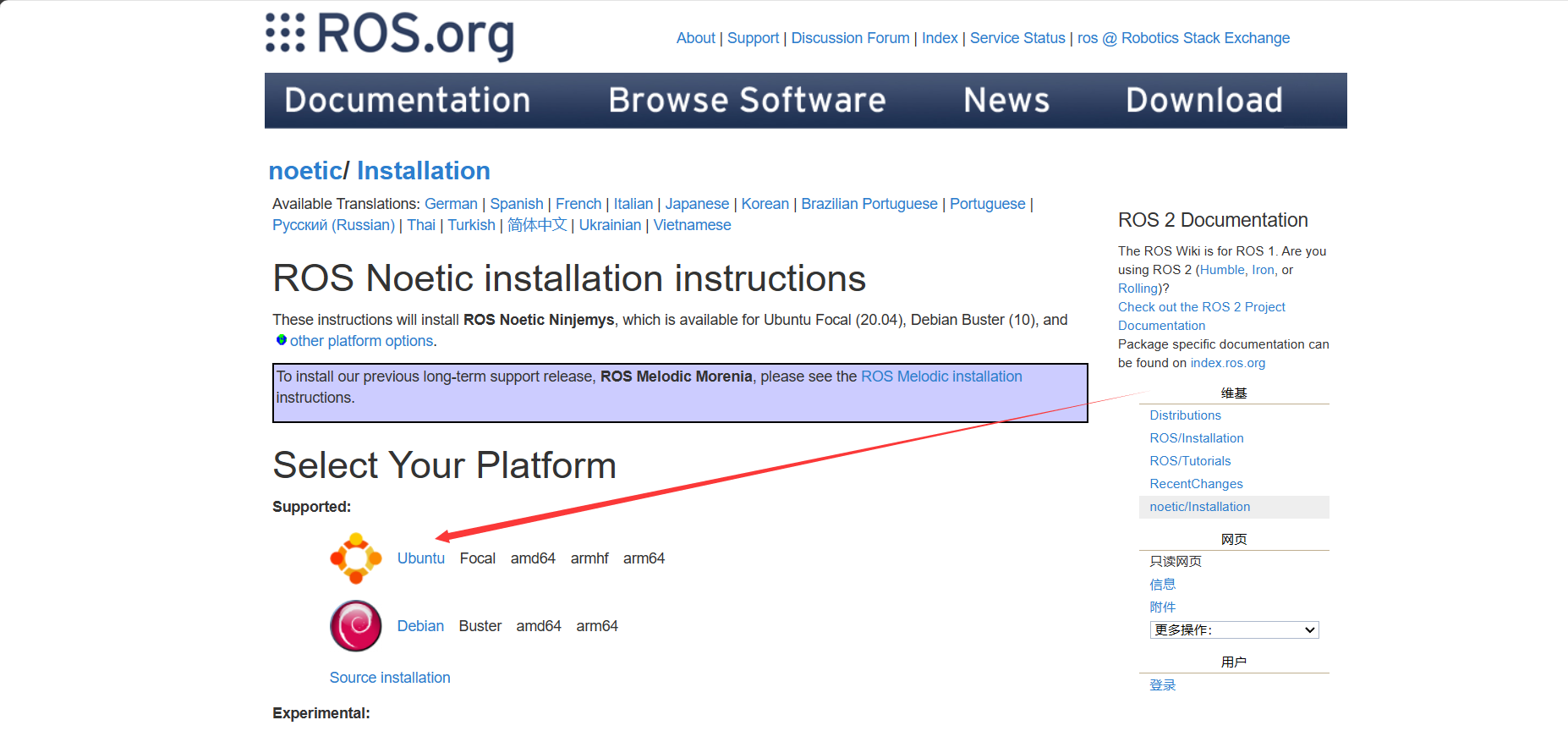
选择Ubuntu
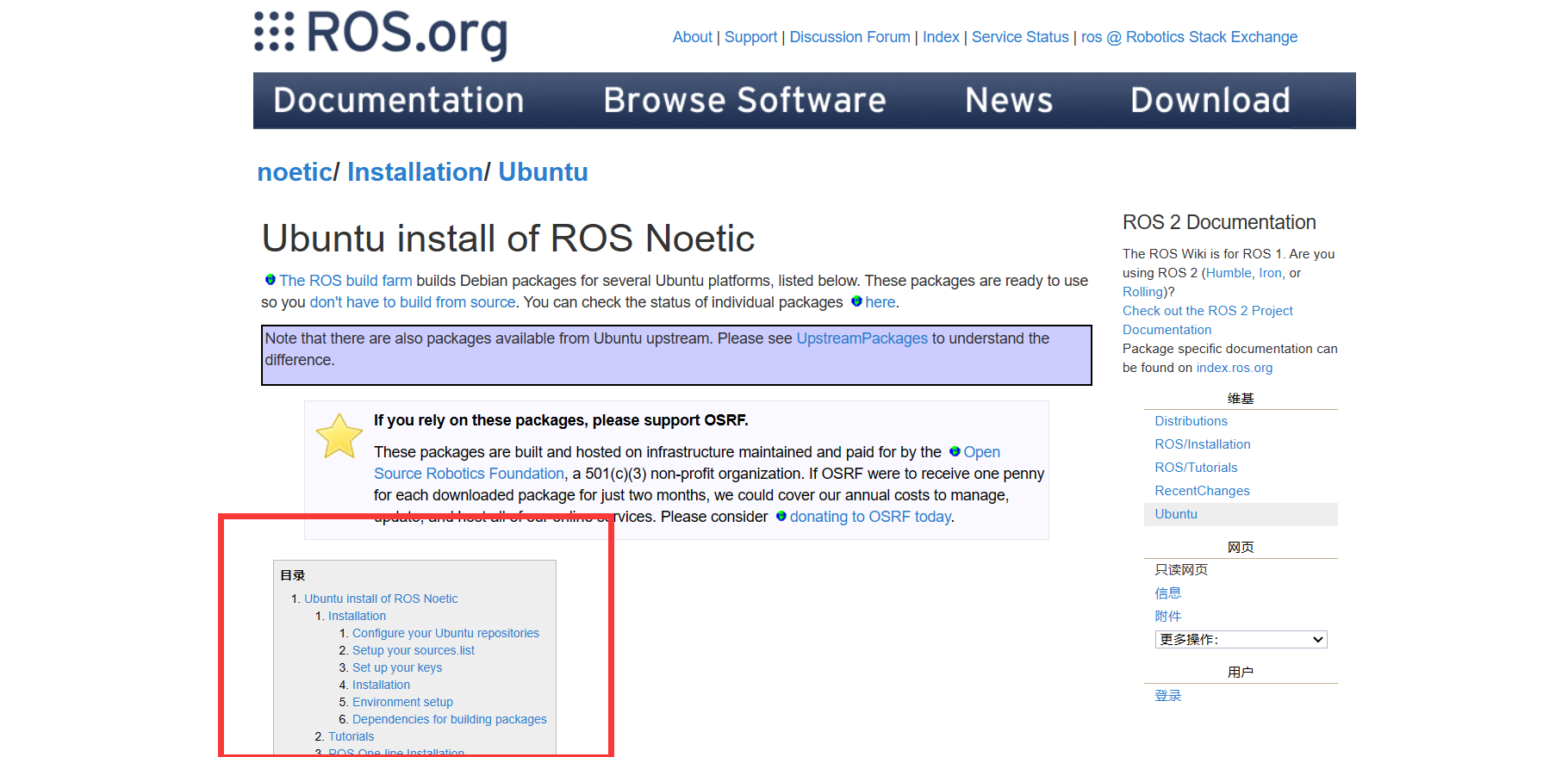
这里就是官方的安装步骤指引。
四、导入ROS安装源
按照官方提示,我们首先导入安装源。

点击mirrors可以选择中国镜像源。
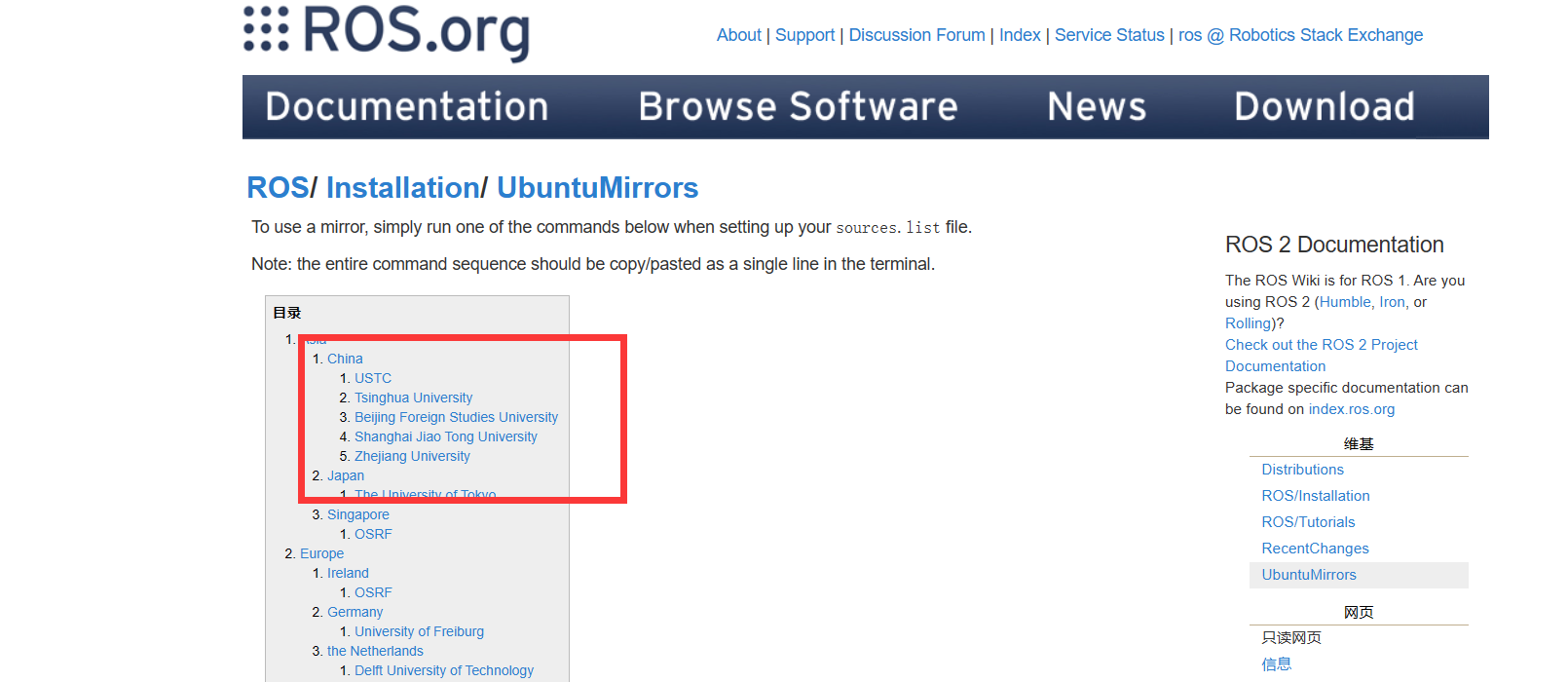
这里我们选清华:

sh
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'运行上述指令。
五、设置安装密钥

sh
sudo apt install curl # if you haven't already installed curlsh
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -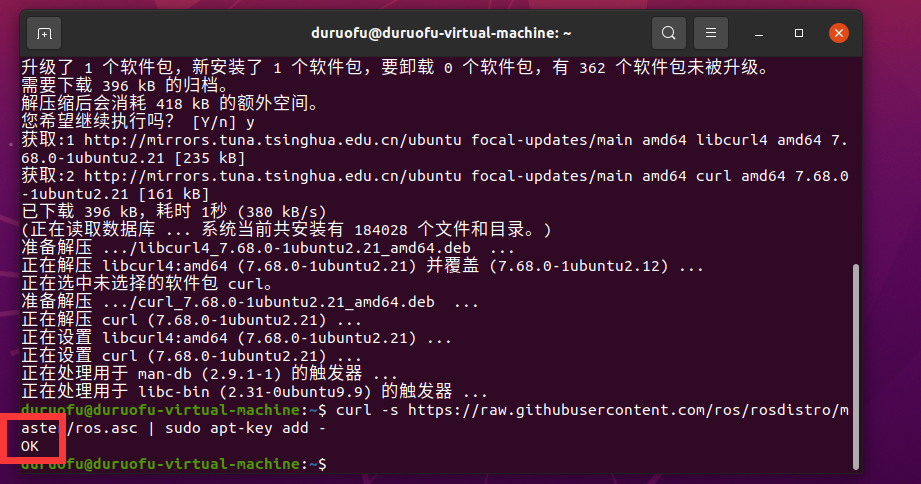
出现OK即可
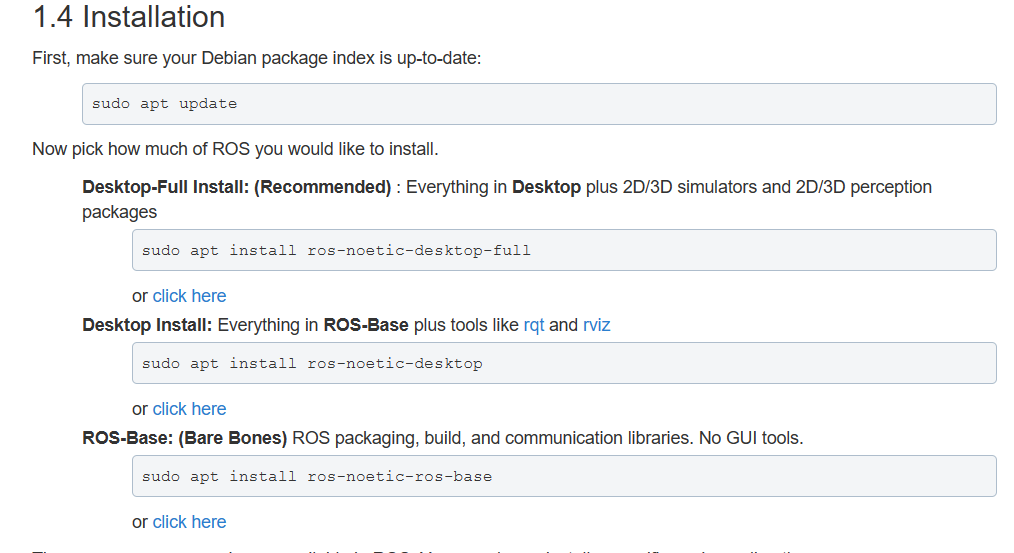
六、下载安装ROS
sh
sudo apt updatesh
sudo apt install ros-noetic-desktop-full
不报错就OK
七、环境参数设置
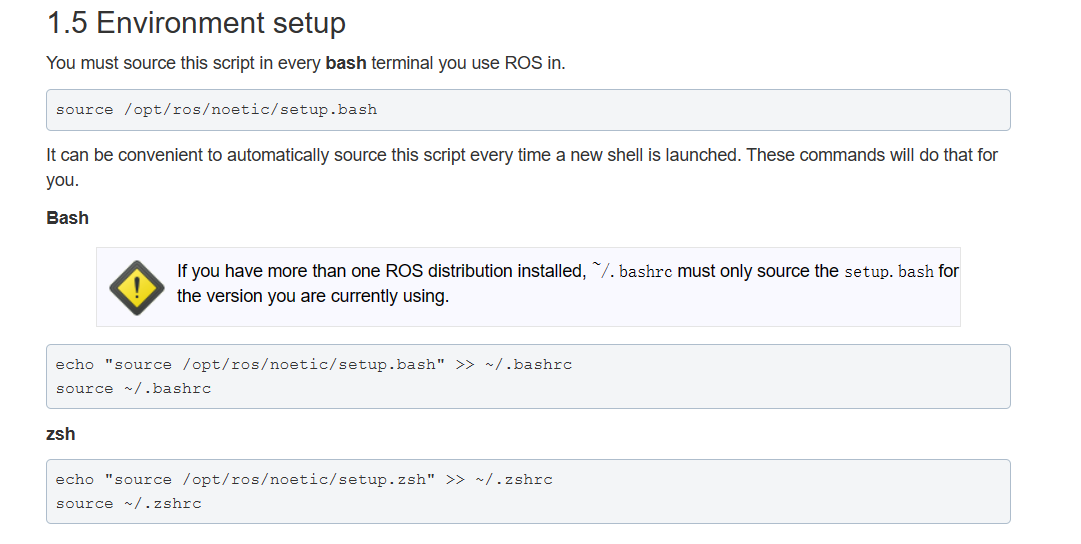
sh
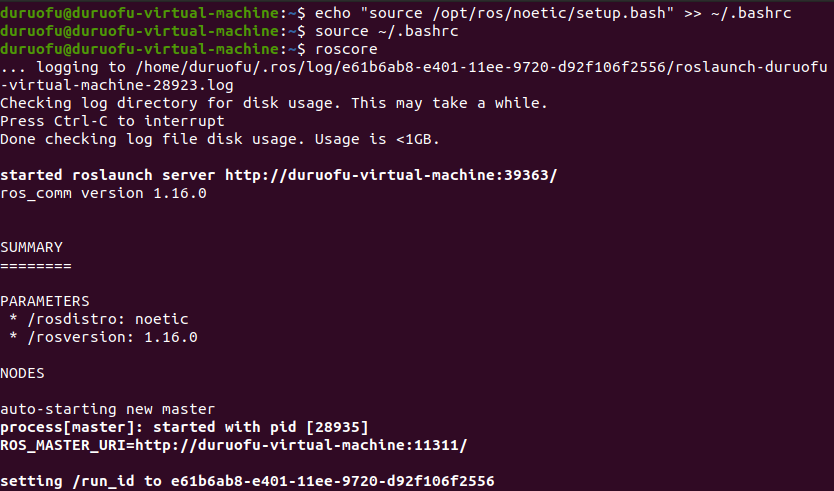
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcc
source ~/.bashrc使用roscore测试,可以正常运行:
八、rosdep初始化
初始化依赖工具:
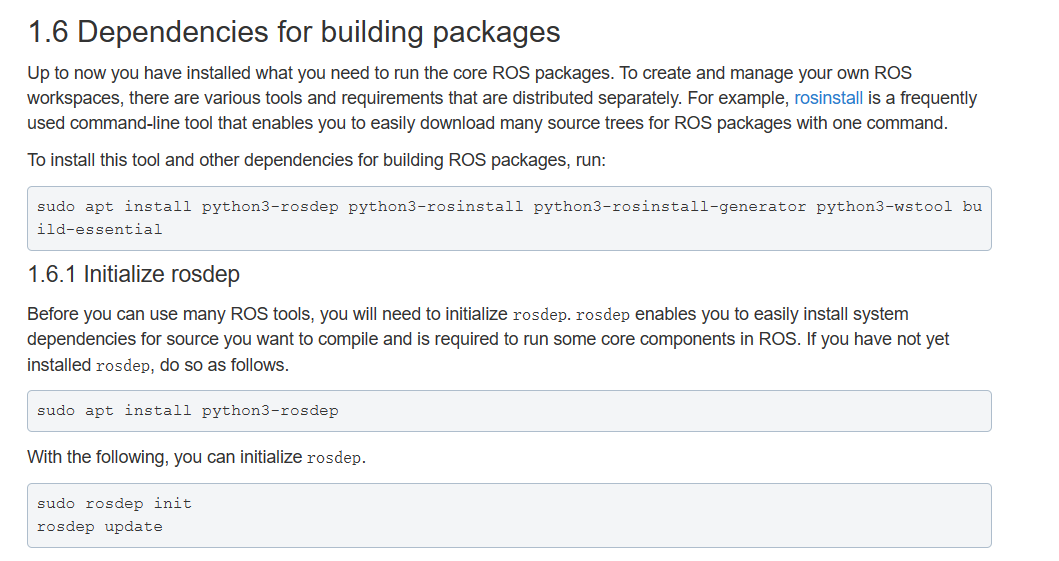
sh
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
不报错就OK
sh
sudo rosdep init
sh
rosdep update
到这里ROS就安装好了。
九、ros初上手
9.1 APT源----ROS应用商店
这个网站提供ros的一些资源:https://index.ros.org/
我们可以找到很多软件包:
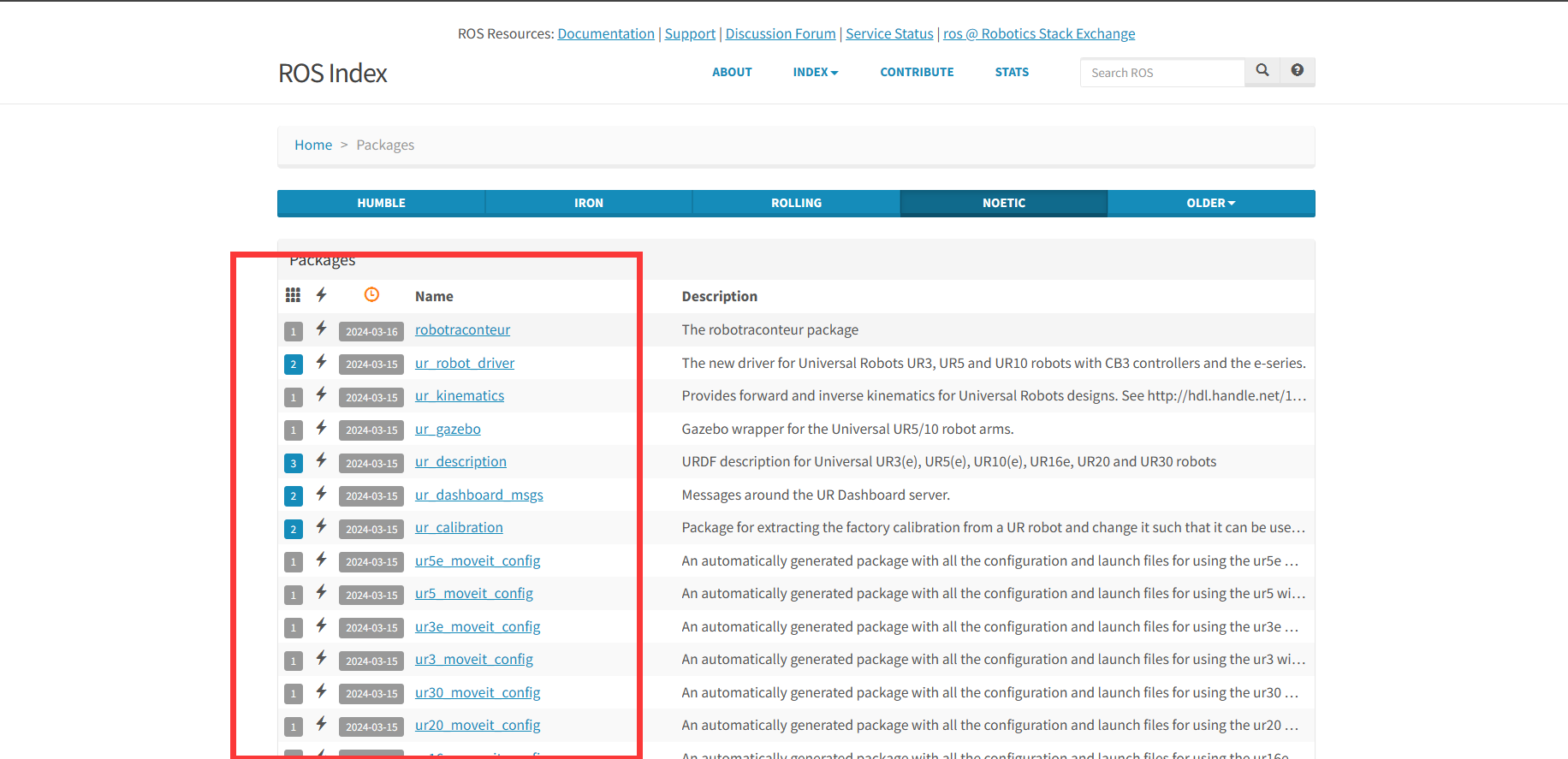
测试安装一个包:rqt-robot-steering
sh
sudo apt install ros-noetic-rqt-robot-steering启动ros核心:roscore
然后测试运行这个rqt-robot-steering包,使用命令
sh
rosrun rqt_robot_steering rqt_robot_steering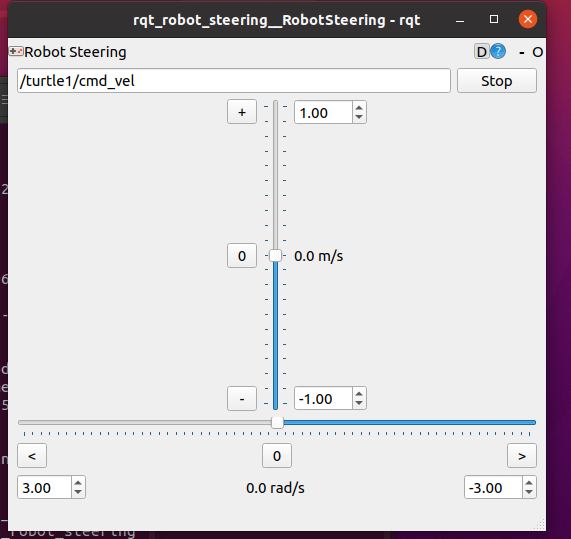
成功打开软件,修改图最上面为/turtle1/cmd_vel
在另一个终端运行乌龟实例
sh
rosrun turtlesim turtlesim_node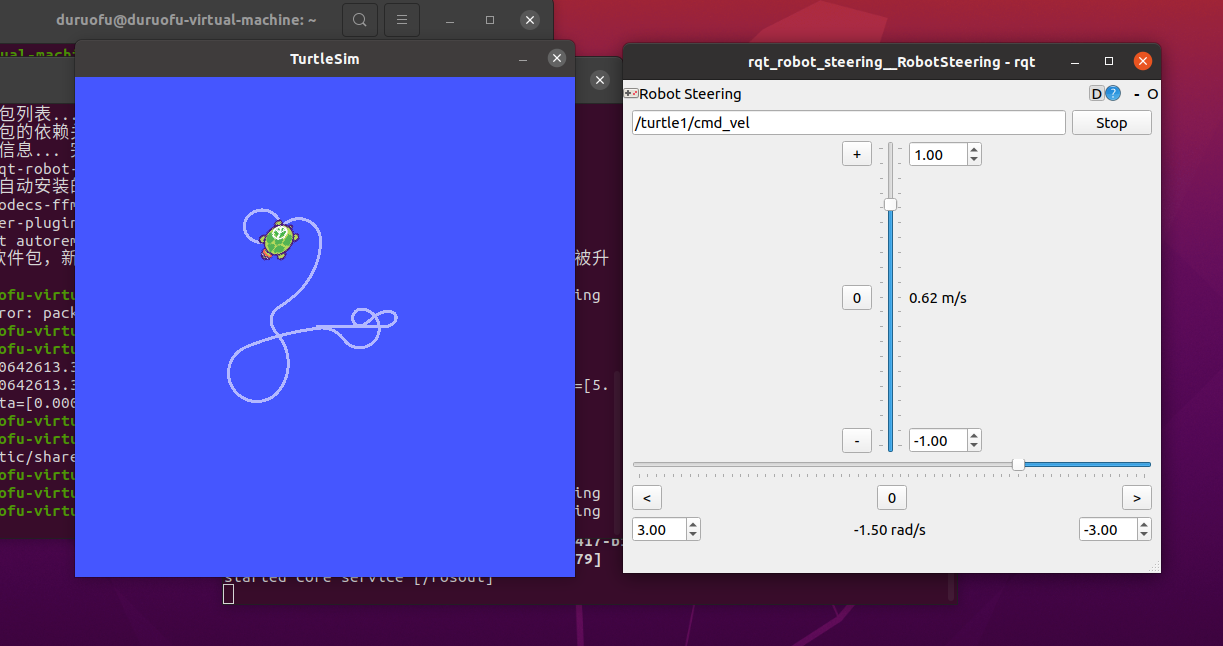
效果如上所示
9.2 Github下载软件包
Github下载编译软件包源码需要建一个工作空间
sh
cd ~
mkdir catkin_ws
cd catkin_ws
mkdir src下面尝试下载一个 WPR系列机器人仿真工具
c
cd catkin_ws/src
git clone https://github.com/6-robot/wpr_simulation.git下载好如图:
安装软件包依赖:
回到工作目录,编译程序:使用catkin_make命令
编译完成,尝试运行
首先需要将包里的环境参数加载到终端程序,使用命令source ~/catkin_ws/devel/setup.bash
然后运行软件包:
sh
roslaunch wpr_simulation wpb_simple.launch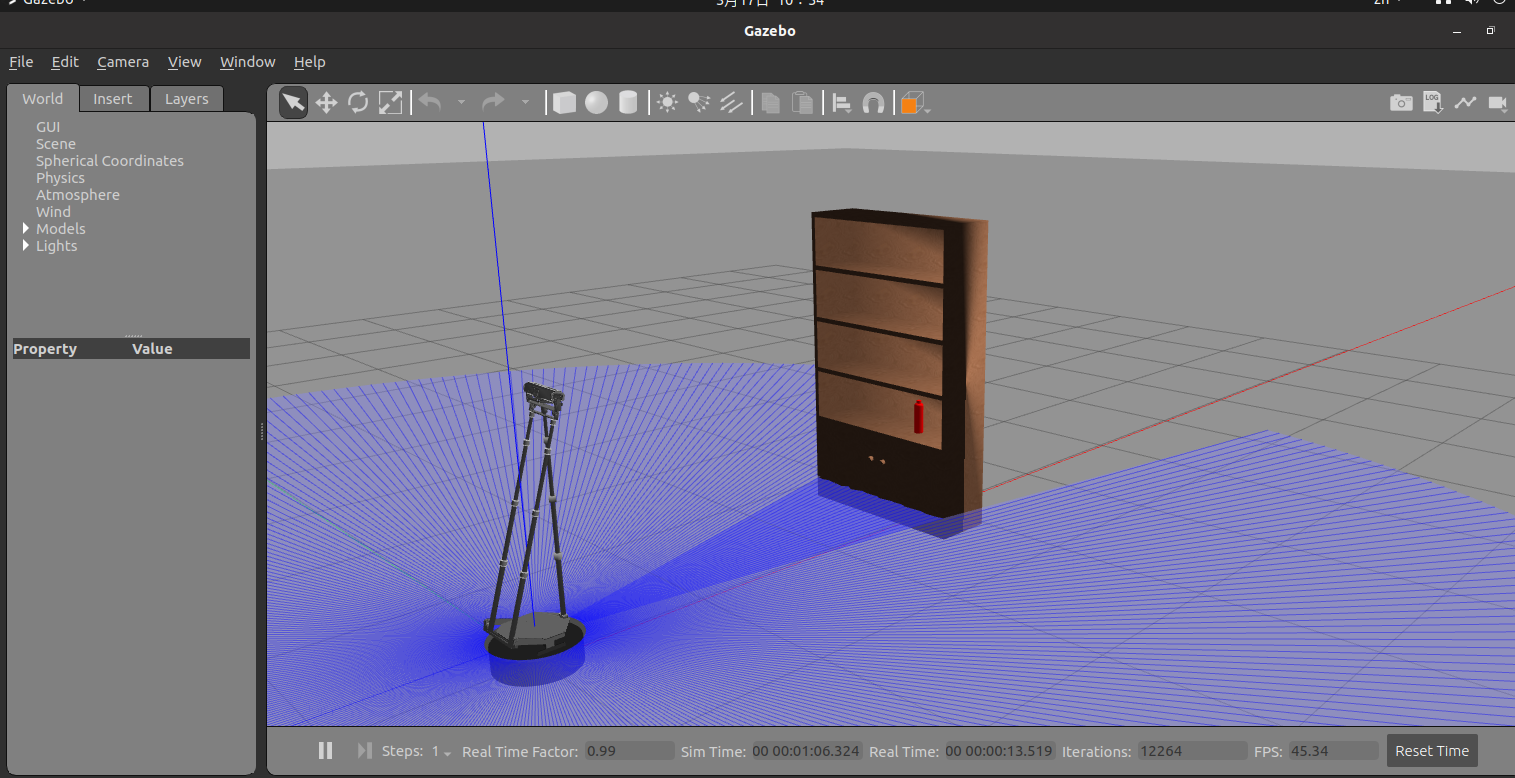
打开上一节使用的控制器软件,来控制一下:
sh
rosrun rqt_robot_steering rqt_robot_steering把控制软件消息指令指令修改为/cmd_ve、
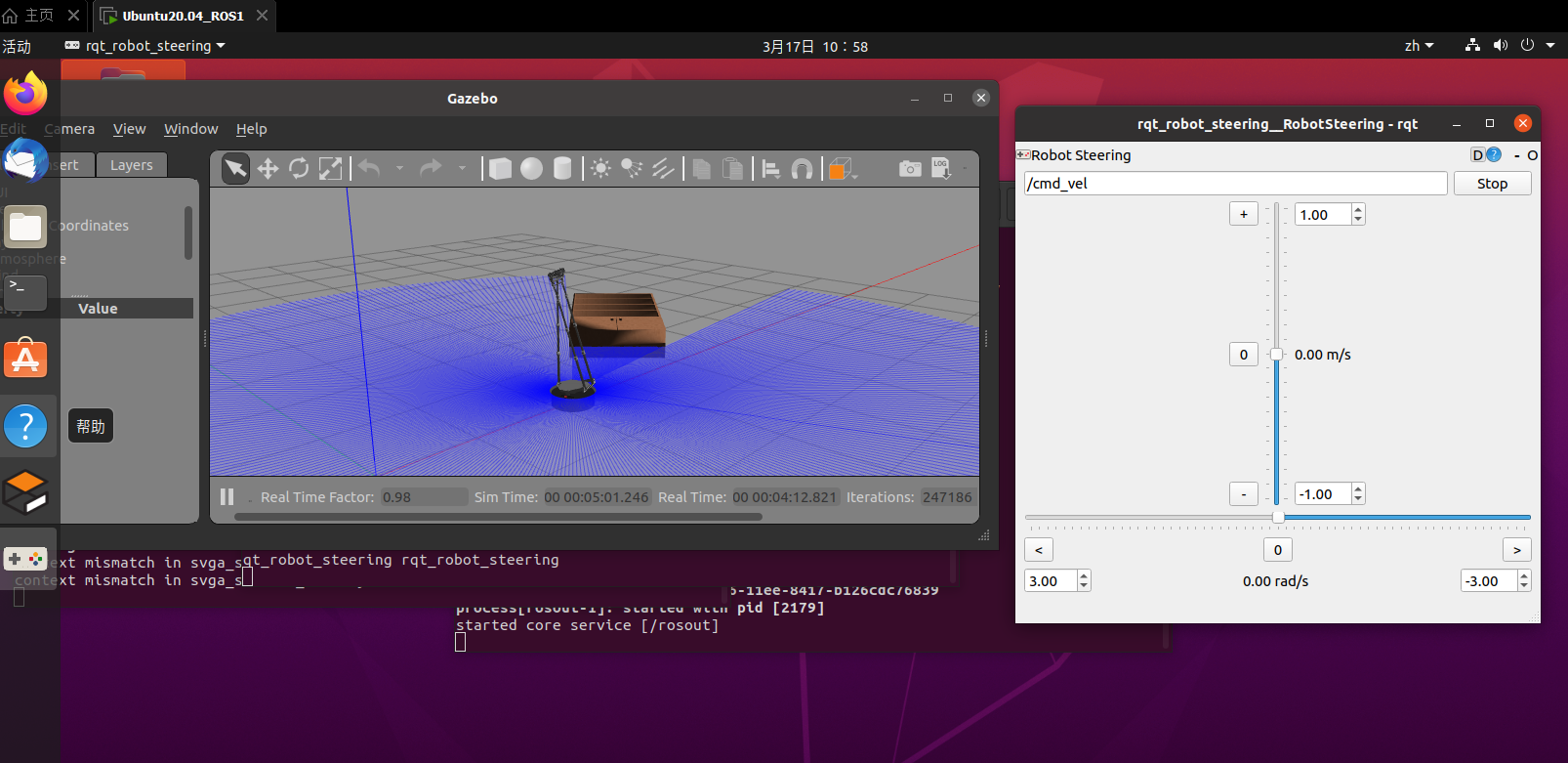
就能控制机器人撞倒柜子了(😂)
最后,我们可以在.bashrc文件添加环境参数,以后就一劳永逸了
c
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc参考链接
- https://wiki.ros.org/noetic/Installation/Ubuntu
- https://wiki.ros.org/ROS/Installation/UbuntuMirrors#USTC
- https://blog.csdn.net/N1CROWN/article/details/126809213#:~:text=Ubuntu20.04安装ROS1 1.更换软件源,2.更新软件列表 3.添加ros软件源 4.添加软件密钥
- https://blog.csdn.net/m0_59161987/article/details/128557068
- https://www.bilibili.com/video/BV1BP4y1o7pw/?spm_id_from=333.1007.top_right_bar_window_history.content.click