Ubuntu_22_04_ROS2安装
一、虚拟机下安装
1.1 安装虚拟机
安装Ubuntu_22_04 版本的虚拟机,较为简单,此处省略。
如果安装完不能复制粘贴和拖拽文件,还需要手动安装VMware Tools
使用命令:
bash
sudo apt update
sudo apt install open-vm-tools open-vm-tools-desktop完成安装后,如果无法拖拽,输入命令:
bash
sudo gedit /etc/gdm3/custom.conf然后,取消注释:
#WaylandEnable=false1.2 安装ROS2
更新软件源:
bash
sudo apt update使用鱼香ROS的一键安装脚本:
bash
wget http://fishros.com/install -O fishros && bash fishros安装完成如下:
1.3 运行小乌龟
在终端中运行以下命令启动小海龟节点:
bash
ros2 run turtlesim turtlesim_node在另一个终端中运行以下命令启动键盘控制节点,就可以控制了
bash
ros2 run turtlesim turtle_teleop_key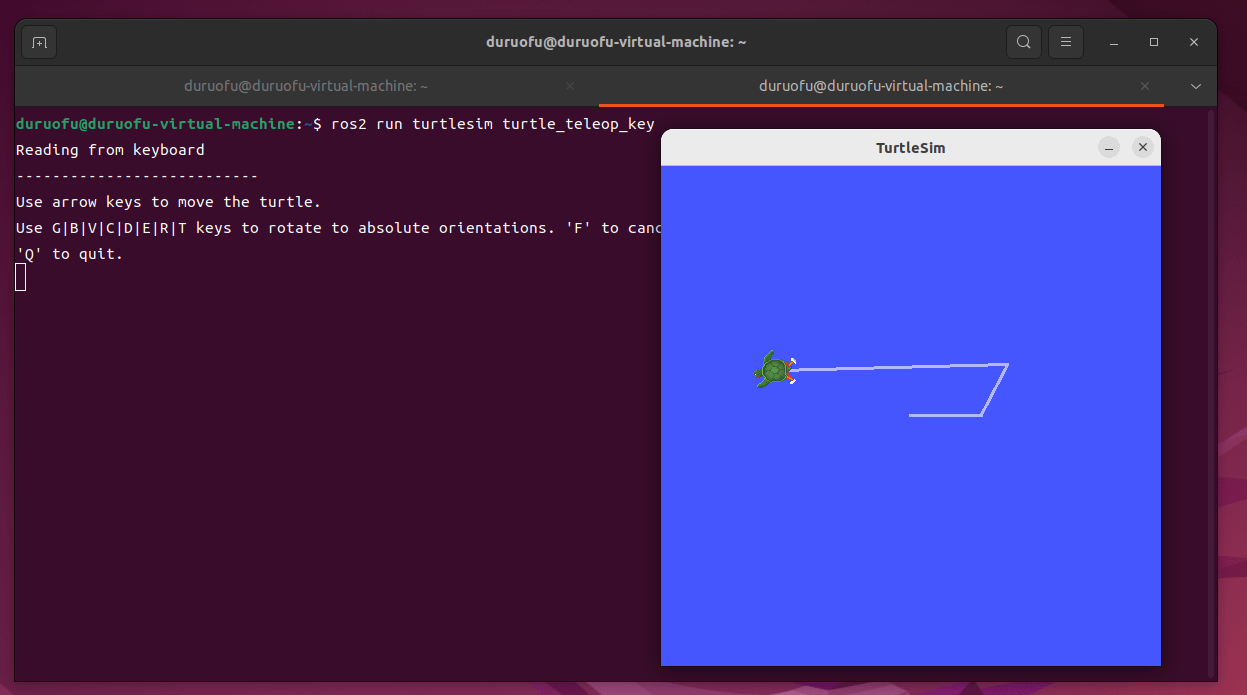
二、WSL下安装
2.1 安装WSL
安装WSL较为简单,此处省略。
2.2 创建Ubuntu 22.04的虚拟机
使用命令,安装虚拟机:
bash
wsl.exe --install Ubuntu-22.04如下图: 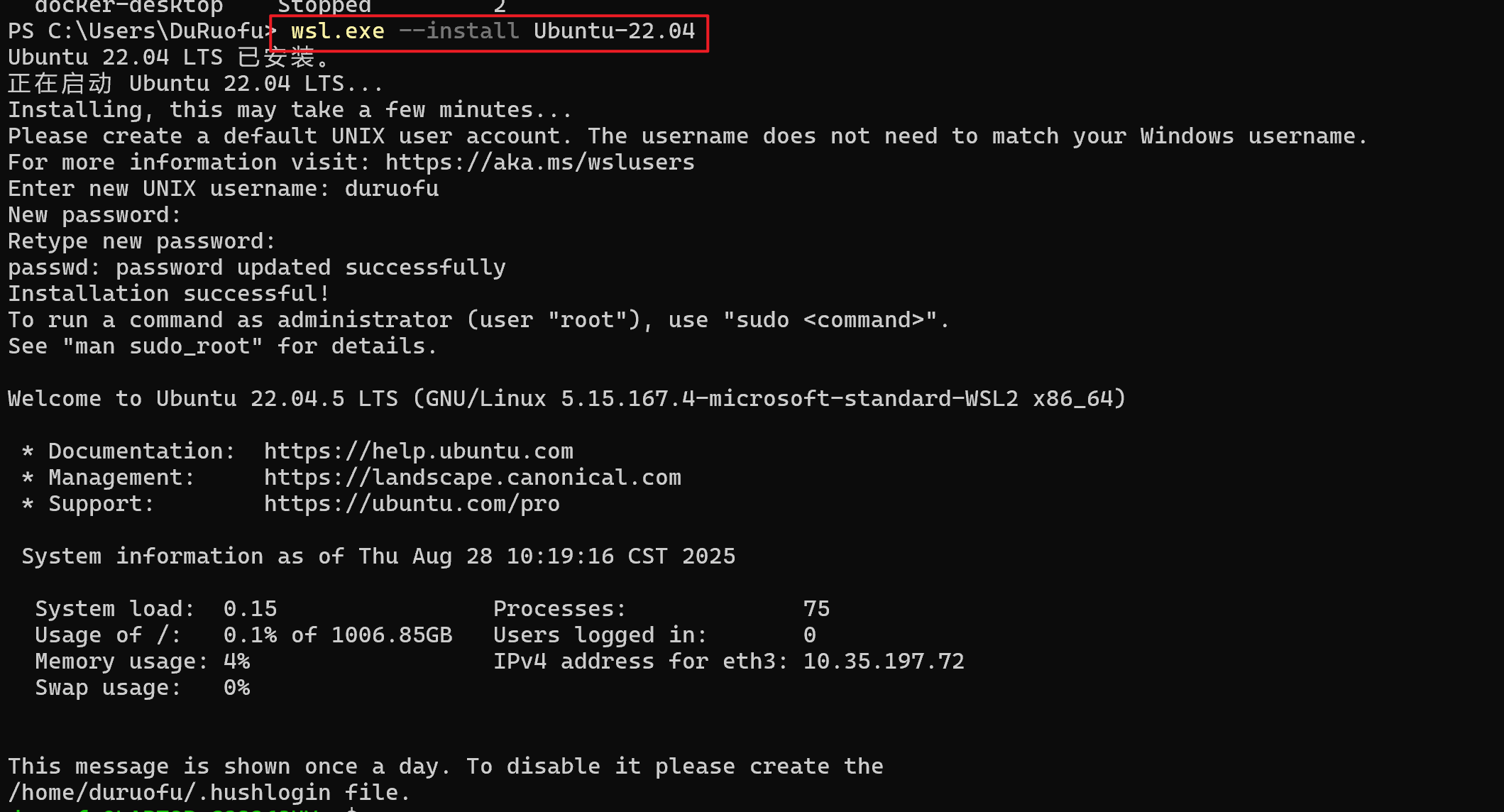
这里默认是安装在C盘的,我们可以使用
wsl --export 发行版名 文件名.tar命令导出,再使用wsl --import 新名称 存储路径 备份文件.tar命令导入,就可以把虚拟机文件存到别的盘符,防止C盘爆满。(注意使用管理员权限)
导出发行版:
bash
wsl.exe --export Ubuntu-22.04 "E:\DuRuofu\VirtualMachine\WSL\Backup\Ubuntu-24.04.tar"删除C盘里安装的:
bash
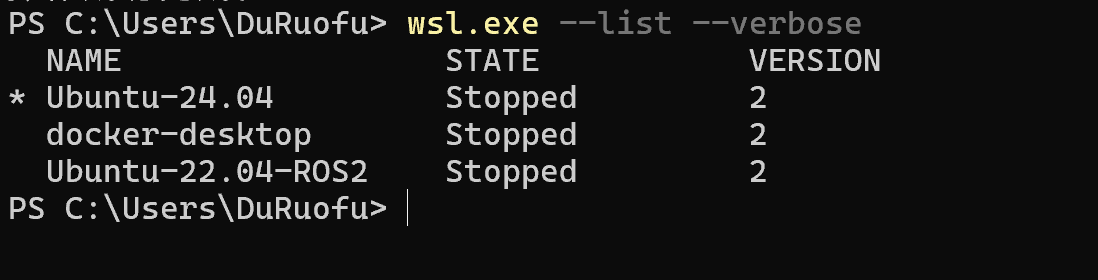
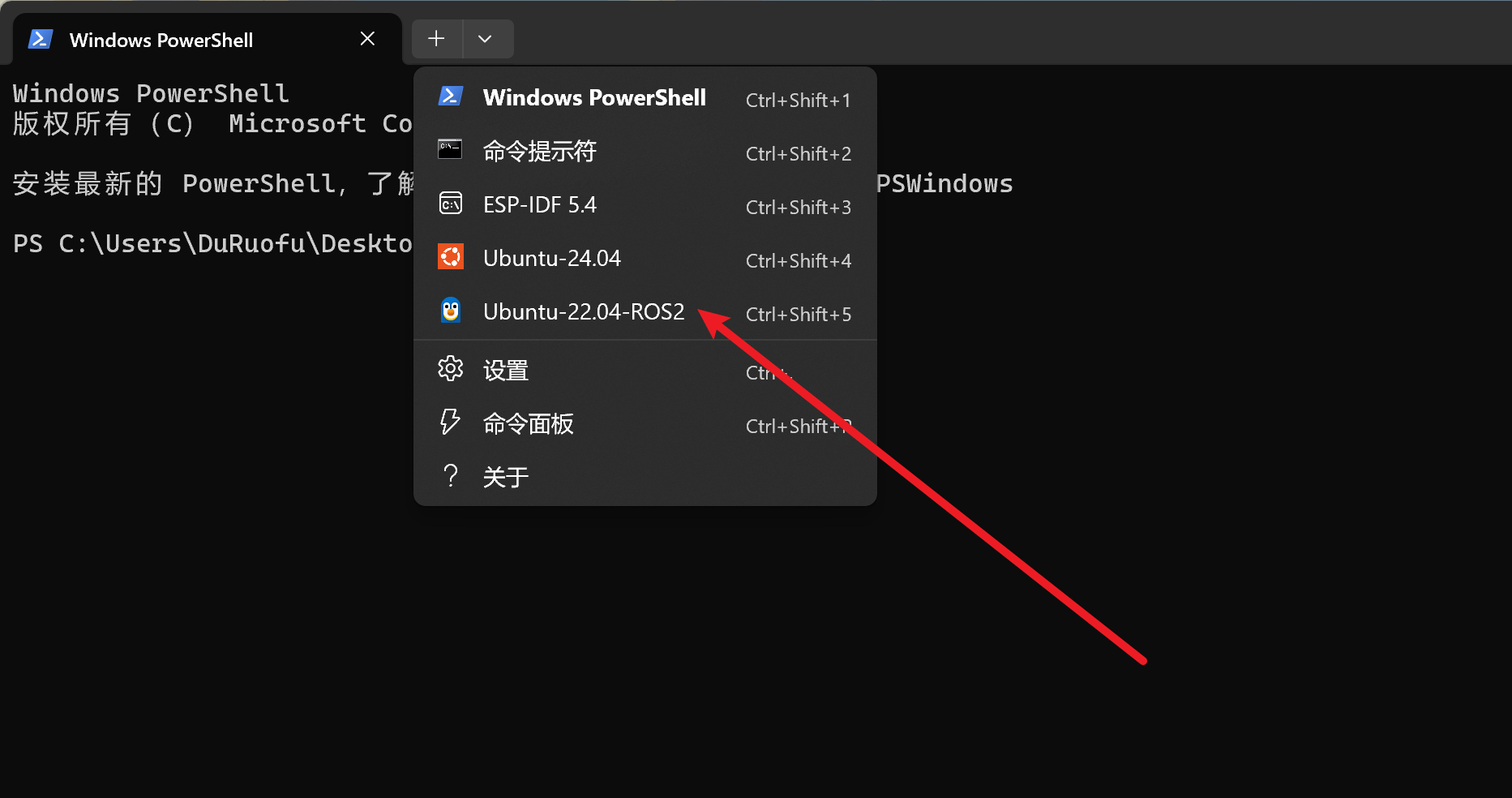
wsl.exe --unregister Ubuntu-22.04重新导入,并命名为Ubuntu-22.04-ROS2:
bash
wsl --import Ubuntu-22.04-ROS2 "E:\DuRuofu\VirtualMachine\WSL\Ubuntu-24.04-ROS2" "E:\DuRuofu\VirtualMachine\WSL\Backup\Ubuntu-24.04.tar"最终如下:
2.3 安装ROS2
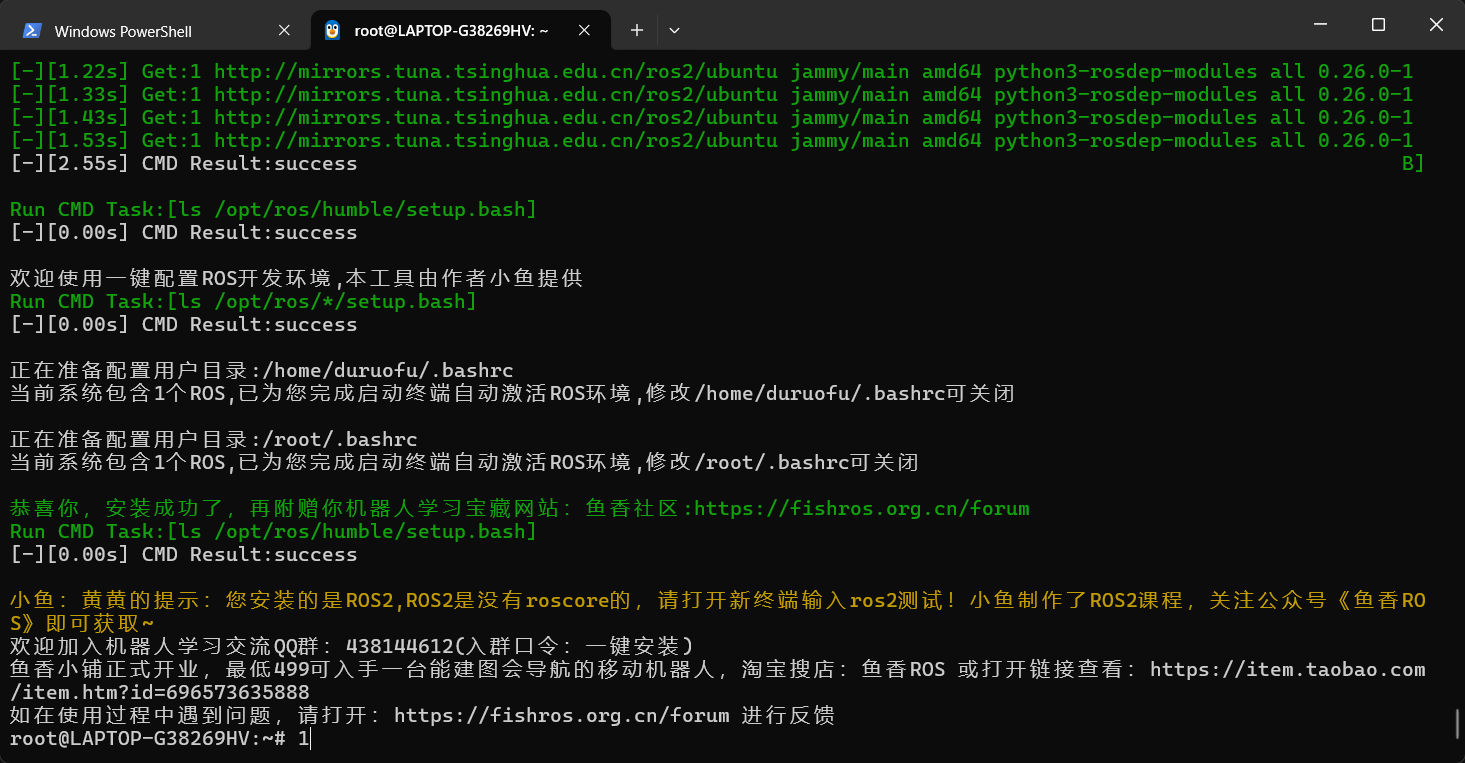
使用鱼香ROS的一键安装脚本:
bash
wget http://fishros.com/install -O fishros && bash fishros中途不报错,安装完成如下:
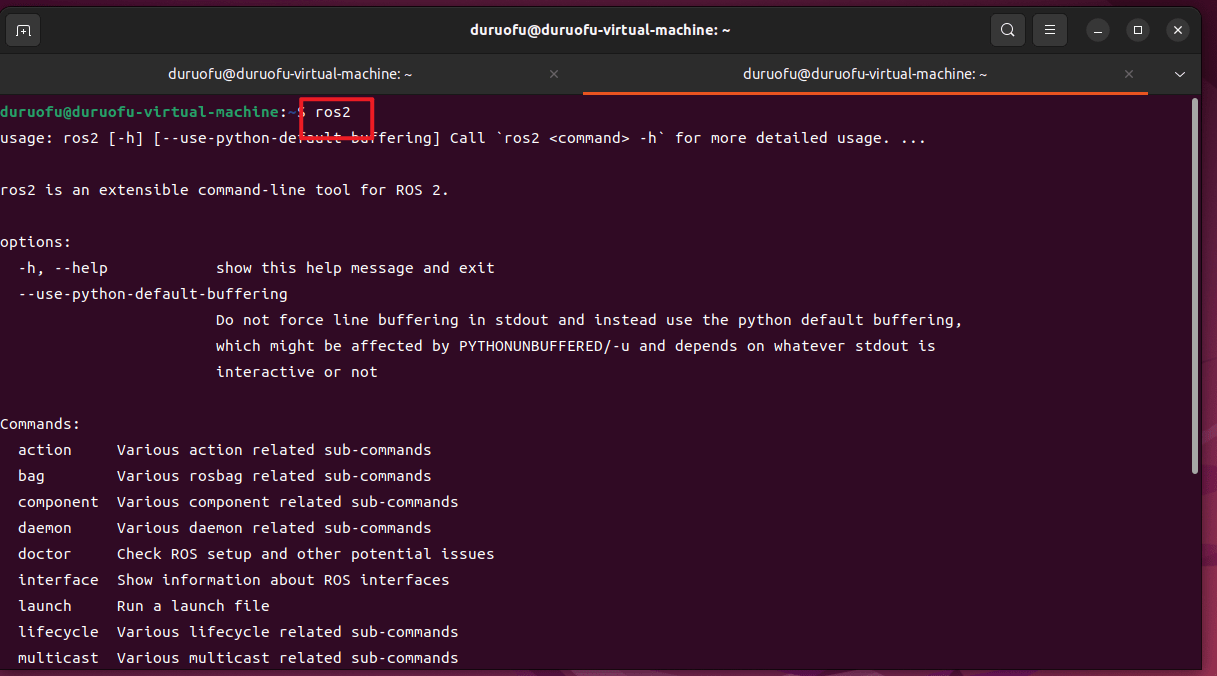
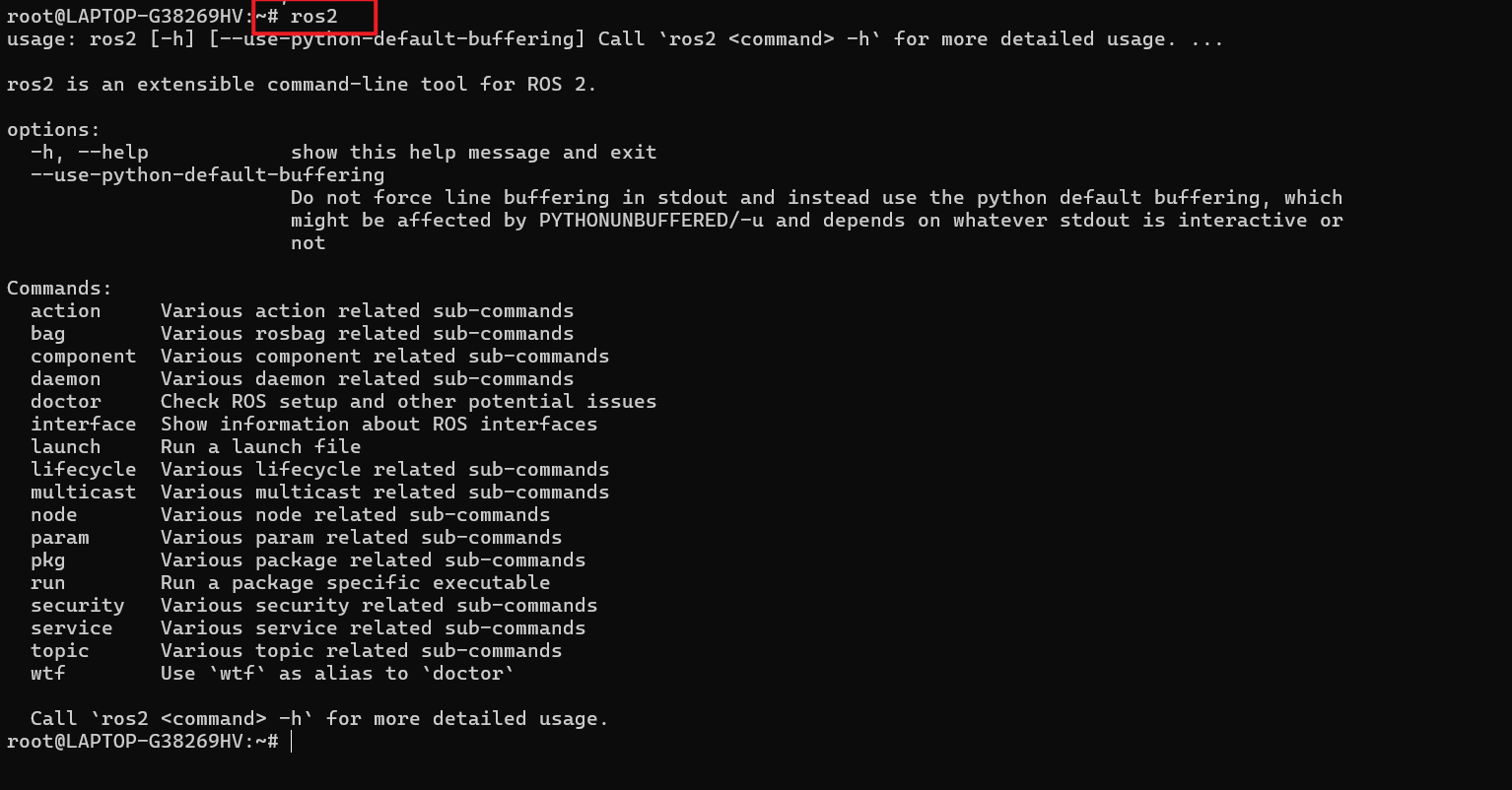
使用命令source ~/.bashrc重新加载环境,使用ros命令检验安装成功:
2.4 尝试运行小海龟
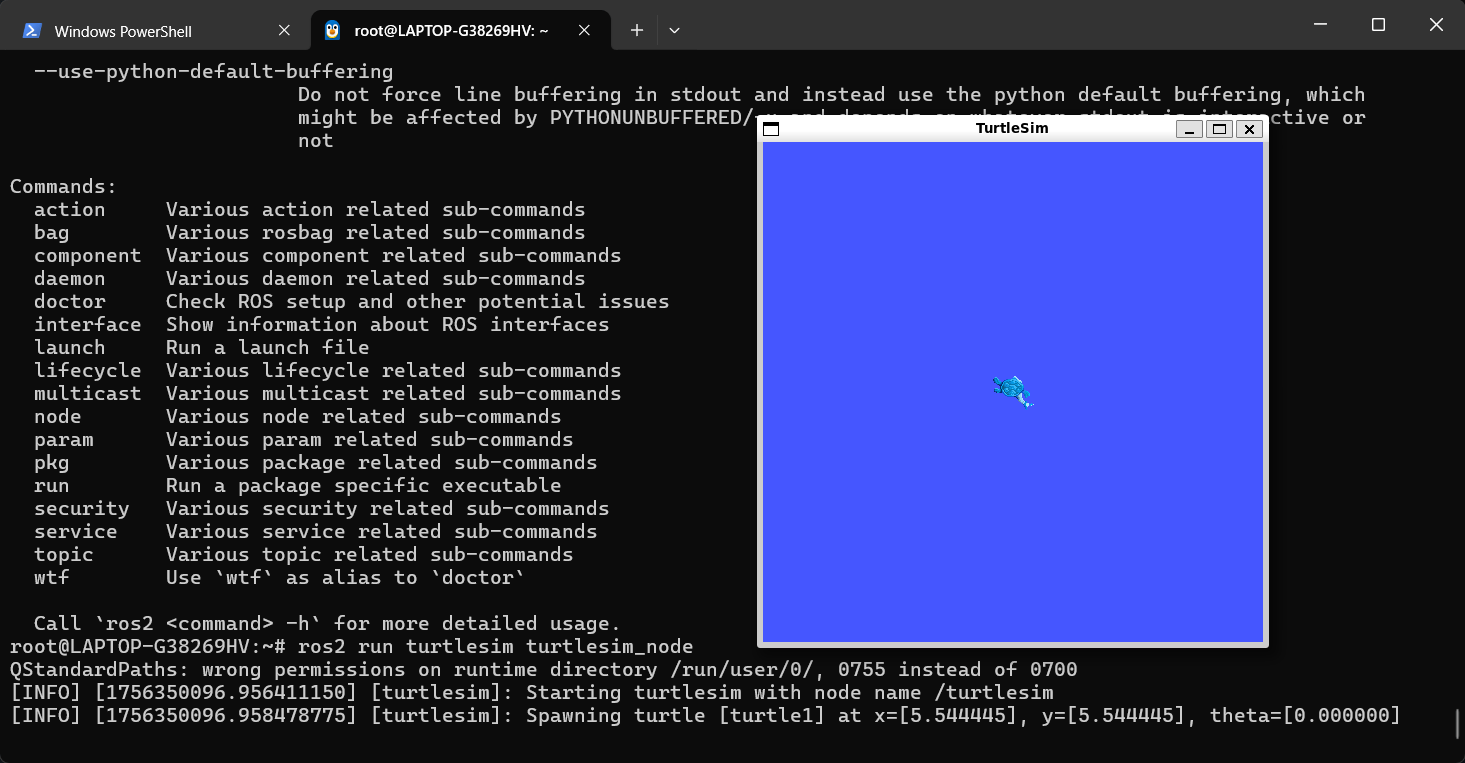
在终端中运行以下命令启动小海龟节点:
bash
ros2 run turtlesim turtlesim_node弹出下面的界面:
在另一个终端中运行以下命令启动键盘控制节点,就可以控制了(但貌似会控制不了,原因不明,但这并不妨碍之后的学习)
bash
ros2 run turtlesim turtle_teleop_keyWSL下的ROS2安装到此为止。