MoveIt 2 环境搭建
一、安装Ros2
二、安装MoveIt 2
官方链接如下: https://moveit.ai/install-moveit2/binary/
使用下面的命令安装(我的ROS版本是humnle)
bash
sudo apt install ros-humble-moveit并且moveit推荐使用其他的底层通信中间件:
We recommend CycloneDDS as a middleware. Note: this makes all nodes started using this RMW incompatible with any other nodes not using Cyclone DDS. sudo apt install ros-$ROS_DISTRO-rmw-cyclonedds-cpp export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp You may want to add
export RMW_IMPLEMENTATION=rmw_cyclonedds_cppto your ~/.bashrc to source it automatically.
这里我们也按照要求,更改一下:
bash
sudo apt install ros-$ROS_DISTRO-rmw-cyclonedds-cpp设置环境变量:
bash
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp要永久生效我们还需要编辑下面的内容:
nano ~/.bashrc然后把这些内容写进去 export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
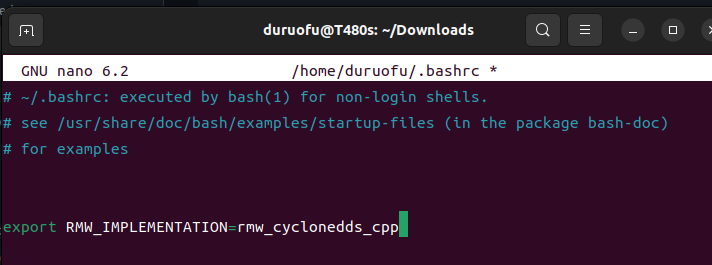
然后重新加载文件:source ~/.bashrc ,至此环境安装完成。