Moveit2 C++ API
一、介绍
MoveIt2 是 ROS2 下广泛使用的机械臂运动规划框架,提供了路径规划、碰撞检测、逆运动学求解、轨迹执行、运动仿真等功能。虽然 MoveIt2 提供了 RViz2 GUI + MoveGroup 接口 来完成大部分规划任务,但在一些复杂应用中:
- 需要在代码中动态生成目标姿态和路径
- 需要对运动规划进行二次封装或集成到自定义机器人控制系统
- 需要将规划结果与外部传感器、视觉识别、AI算法结合
此时就需要直接使用 MoveIt2 C++ API。也可以使用Python版本,但是据说没有C++版本好用。下面我们尝试自己编写代码来控制机械臂。
二、案例
整体的结构是这样的:
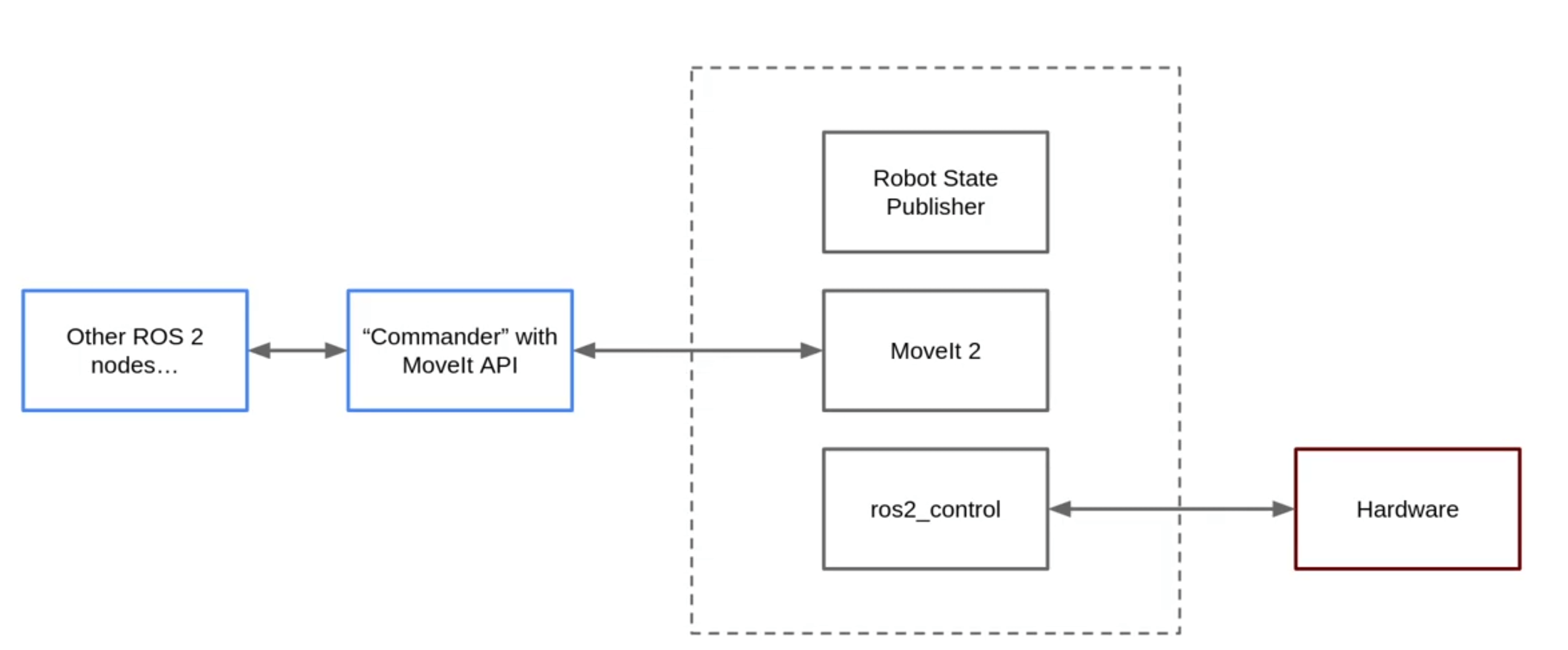
本部分我们聚焦于左侧,使用API来控制Moveit2。
2.1 快速上手:姿态切换
创建一个新的包作为控制包:
cd ros2_ws/src
ros2 pkg create my_robot_commander_cpp --dependencies rclcpp在src下新建文件test_moveit.cpp:
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("test_moveit");
rclcpp::executors::SingleThreadedExecutor executor;
executor.add_node(node);
auto spinner = std::thread([&executor]() { executor.spin(); });
auto arm = moveit::planning_interface::MoveGroupInterface(node, "arm");
arm.setMaxVelocityScalingFactor(1.0);
arm.setMaxAccelerationScalingFactor(1.0);
// 设置初始位置和目标位置
arm.setStartStateToCurrentState();
arm.setNamedTarget("pose_1");
// 规划运动路径
moveit::planning_interface::MoveGroupInterface::Plan Plan1;
bool success1 = (arm.plan(Plan1) == moveit::core::MoveItErrorCode::SUCCESS);
if (success1)
{
// 运行运动
arm.execute(Plan1);
}
else
{
RCLCPP_ERROR(node->get_logger(), "Planning failed");
}
rclcpp::shutdown();
spinner.join();
return 0;
}这段代码展示了如何使用 MoveIt2 C++ API 控制机械臂:
初始化 ROS2 节点
cpprclcpp::init(argc, argv); auto node = std::make_shared<rclcpp::Node>("test_moveit");创建 ROS2 节点,为 MoveIt2 提供运行环境。
启动回调处理线程
cpprclcpp::executors::SingleThreadedExecutor executor; executor.add_node(node); auto spinner = std::thread([&executor]() { executor.spin(); });持续处理 ROS2 消息和 MoveIt2 动作反馈。
创建 MoveGroupInterface 对象
cppauto arm = moveit::planning_interface::MoveGroupInterface(node, "arm");"arm"是机械臂规划组,通过它可以规划和执行运动。设置速度、起点和目标
cpparm.setMaxVelocityScalingFactor(1.0); arm.setMaxAccelerationScalingFactor(1.0); arm.setStartStateToCurrentState(); arm.setNamedTarget("pose_1");控制机械臂运动速度,设置规划起点和目标姿态。
规划轨迹并执行
cppmoveit::planning_interface::MoveGroupInterface::Plan Plan1; if (arm.plan(Plan1) == moveit::core::MoveItErrorCode::SUCCESS) arm.execute(Plan1); else RCLCPP_ERROR(node->get_logger(), "Planning failed");根据起点和目标生成轨迹,规划成功后执行运动,否则报错。
关闭 ROS2
cpprclcpp::shutdown(); spinner.join();释放资源,程序结束。
最后修改项目的CMakelist:
cmake_minimum_required(VERSION 3.8)
project(my_robot_commander_cpp)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(moveit_ros_planning_interface REQUIRED)
add_executable(test_moveit src/test_moveit.cpp)
ament_target_dependencies(test_moveit rclcpp moveit_ros_planning_interface)
install(TARGETS
test_moveit
DESTINATION lib/${PROJECT_NAME}/
)
ament_package()并在package.xml里添加依赖:
<depend>rclcpp</depend>
<depend>moveit_ros_planning_interface</depend>编译:
cd ros2_ws
colcon build
source install/setup.bash启动launch文件
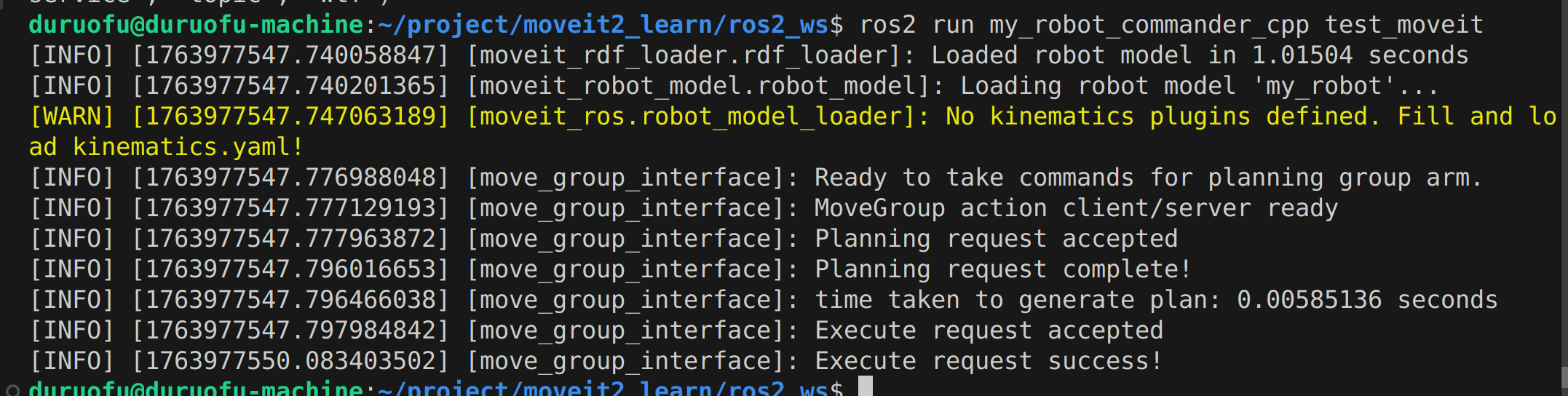
ros2 launch my_robot_bringup robot.launch.py然后执行我们编写的控制器测试包:
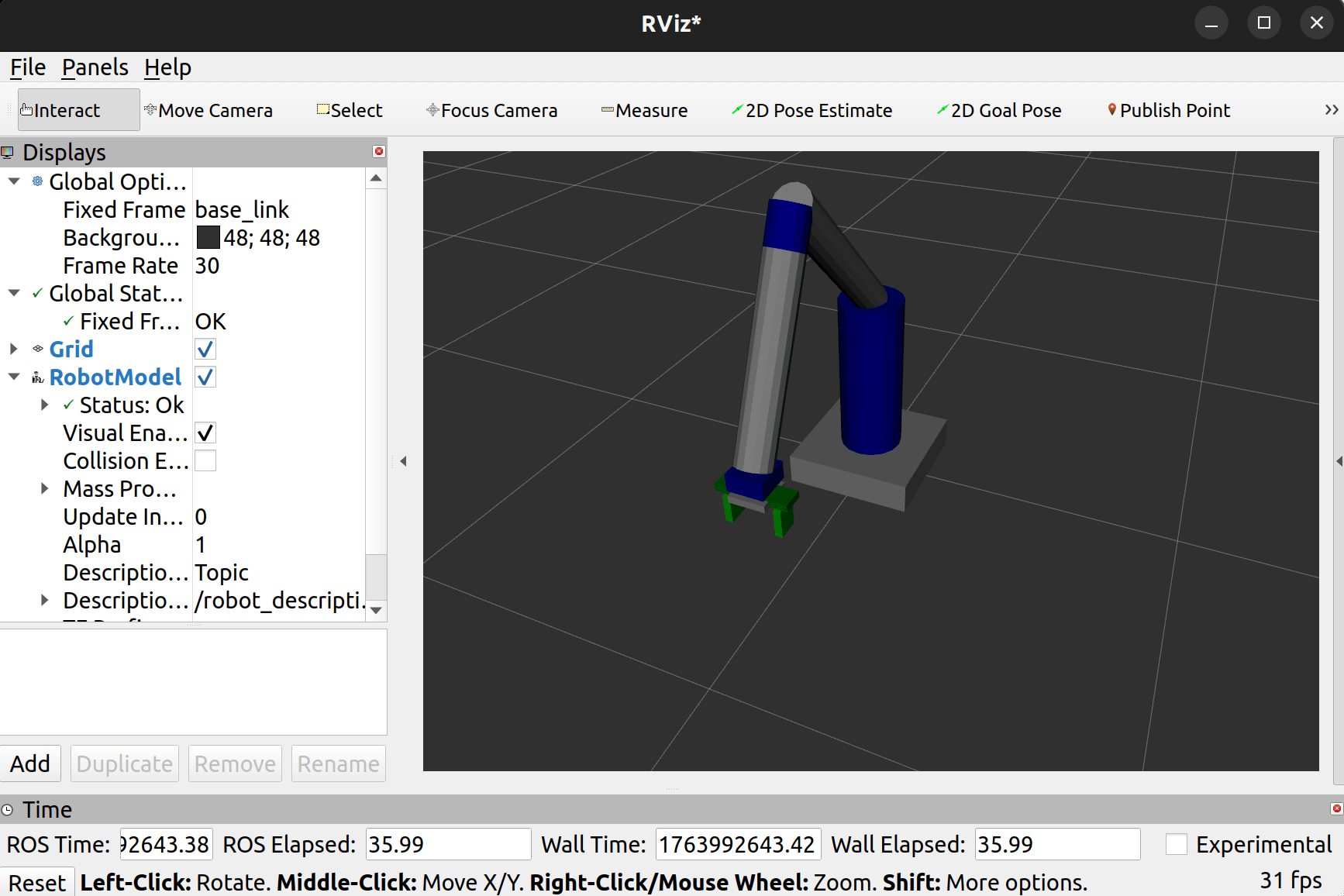
ros2 run my_robot_commander_cpp test_moveit运行成功,机器人的目标位置发生了改变:
2.2 细节控制:指定关节角度
代码如下:
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("test_moveit");
rclcpp::executors::SingleThreadedExecutor executor;
executor.add_node(node);
auto spinner = std::thread([&executor]() { executor.spin(); });
auto arm = moveit::planning_interface::MoveGroupInterface(node, "arm");
arm.setMaxVelocityScalingFactor(1.0);
arm.setMaxAccelerationScalingFactor(1.0);
// 指定关节角度
std::vector<double> joints = {1.5,0.5,0.0,1.5,0.0,-0.7};
arm.setStartStateToCurrentState();
arm.setJointValueTarget(joints);
moveit::planning_interface::MoveGroupInterface::Plan Plan1;
bool success1 = (arm.plan(Plan1) == moveit::core::MoveItErrorCode::SUCCESS);
if (success1)
{
arm.execute(Plan1);
}
else
{
RCLCPP_ERROR(node->get_logger(), "Planning failed");
}
rclcpp::shutdown();
spinner.join();
return 0;
}执行效果如下:
2.3 目标姿态控制(重要)
代码如下:
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("test_moveit");
rclcpp::executors::SingleThreadedExecutor executor;
executor.add_node(node);
auto spinner = std::thread([&executor]() { executor.spin(); });
auto arm = moveit::planning_interface::MoveGroupInterface(node, "arm");
arm.setMaxVelocityScalingFactor(1.0);
arm.setMaxAccelerationScalingFactor(1.0);
// 指定目标姿态
tf2::Quaternion q;
q.setRPY(3.14, 0.0, 0.0);
q = q.normalize();
geometry_msgs::msg::PoseStamped target_pose;
target_pose.header.frame_id = "base_link";
target_pose.pose.position.x = 0.0;
target_pose.pose.position.y = -0.7;
target_pose.pose.position.z = 0.4;
target_pose.pose.orientation.x = q.getX();
target_pose.pose.orientation.y = q.getY();
target_pose.pose.orientation.z = q.getZ();
target_pose.pose.orientation.w = q.getW();
arm.setStartStateToCurrentState();
arm.setPoseTarget(target_pose);
moveit::planning_interface::MoveGroupInterface::Plan Plan1;
bool success1 = (arm.plan(Plan1) == moveit::core::MoveItErrorCode::SUCCESS);
if (success1)
{
arm.execute(Plan1);
}
else
{
RCLCPP_ERROR(node->get_logger(), "Planning failed");
}
rclcpp::shutdown();
spinner.join();
return 0;
}在 MoveIt2 中,通过 Pose(位置 + 姿态)来描述机械臂末端执行器的目标点。本段代码主要分为两部分:
① 设置目标姿态(orientation)
tf2::Quaternion q;
q.setRPY(3.14, 0.0, 0.0); // 通过 Roll、Pitch、Yaw 设置目标旋转
q = q.normalize();这里使用 欧拉角 RPY(Roll、Pitch、Yaw) 来定义末端执行器的方向:
Roll = 3.14→ 绕 X 轴旋转 180°Pitch = 0Yaw = 0
然后将其转换成四元数(MoveIt 使用四元数表示姿态)。 最后:
target_pose.pose.orientation.x = q.getX();
...将四元数填入目标姿态。
这一步决定机械臂末端执行器面向哪个方向,例如爪子是向下、向上还是侧向。
② 设置目标位置(position)
target_pose.header.frame_id = "base_link"; // 目标点坐标参考 base_link
target_pose.pose.position.x = 0.0;
target_pose.pose.position.y = -0.7;
target_pose.pose.position.z = 0.4;目标位置是一个 3D 坐标,含义如下:
- x = 0.0 → 前后方向(前为正)
- y = -0.7 → 左右方向(右为负)
- z = 0.4 → 垂直高度(上为正)
这些坐标全部基于 base_link 坐标系,即机械臂底座作为参考点。
这一步决定机械臂末端要到达空间中的具体点。
PoseTarget = 位置 + 姿态
MoveIt 中:
位置(Position) = x, y, z姿态(Orientation) = 四元数 q
两者共同决定机械臂末端到达的完整位姿(Pose):
arm.setPoseTarget(target_pose);之后就由 MoveIt 来规划路径。
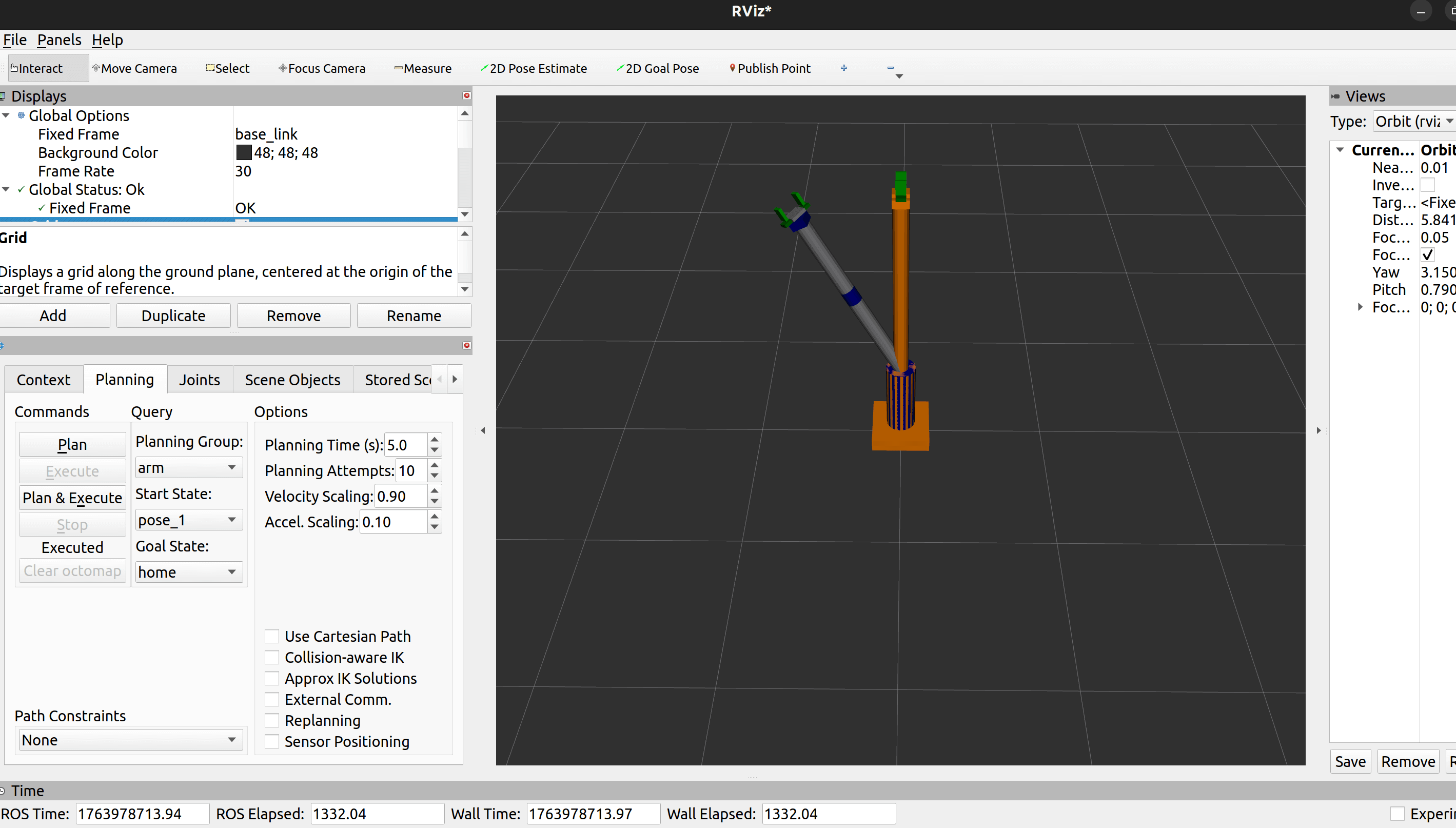
运行后呈现这个状态:
2.4 笛卡尔路径规划
在机械臂控制中,“笛卡尔路径(Cartesian Path)”指的是:让机械臂末端执行器沿着空间中的一条直线或曲线运动,而不是关节角度随便变化的路径。
也就是说:
机器人末端(tool0 / ee_link)在 3D 空间中的轨迹是连续且可控的轨迹,而不是 MoveIt 自动规划出的任意关节路径。
MoveIt 默认规划是在 关节空间里规划:
机械臂可能会走奇怪的弯路,末端轨迹不是直线,无法精确控制末端在空间的路径
对以下任务特别不适用:
- 抓取、插入、贴装(必须直线移动)
- 点胶、焊接(需要固定轨迹)
- 在狭窄空间运动(不能乱走弯路)
所以需要使用 “笛卡尔路径”。
在2.3 的代码基础上加上一段笛卡尔路径规划,让机械臂运动完末端抬升20cm:
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("test_moveit");
rclcpp::executors::SingleThreadedExecutor executor;
executor.add_node(node);
auto spinner = std::thread([&executor]() { executor.spin(); });
auto arm = moveit::planning_interface::MoveGroupInterface(node, "arm");
arm.setMaxVelocityScalingFactor(1.0);
arm.setMaxAccelerationScalingFactor(1.0);
// 指定目标姿态
tf2::Quaternion q;
q.setRPY(3.14, 0.0, 0.0);
q = q.normalize();
geometry_msgs::msg::PoseStamped target_pose;
target_pose.header.frame_id = "base_link";
target_pose.pose.position.x = 0.0;
target_pose.pose.position.y = -0.7;
target_pose.pose.position.z = 0.4;
target_pose.pose.orientation.x = q.getX();
target_pose.pose.orientation.y = q.getY();
target_pose.pose.orientation.z = q.getZ();
target_pose.pose.orientation.w = q.getW();
arm.setStartStateToCurrentState();
arm.setPoseTarget(target_pose);
moveit::planning_interface::MoveGroupInterface::Plan Plan1;
bool success1 = (arm.plan(Plan1) == moveit::core::MoveItErrorCode::SUCCESS);
if (success1)
{
arm.execute(Plan1);
}
else
{
RCLCPP_ERROR(node->get_logger(), "Planning failed");
}
// 笛卡尔空间路径规划
std::vector<geometry_msgs::msg::Pose> waypoints;
geometry_msgs::msg::Pose pose1 = arm.getCurrentPose().pose;
pose1.position.z += 0.2;
waypoints.push_back(pose1);
moveit_msgs::msg::RobotTrajectory trajectory;
double fraction = arm.computeCartesianPath(waypoints, 0.01, 0.0, trajectory);
if (fraction >= 0.9)
{
arm.execute(trajectory);
}
else
{
RCLCPP_ERROR(node->get_logger(), "Cartesian path planning failed");
}
rclcpp::shutdown();
spinner.join();
return 0;
}执行后效果如下图,可以看到最后这段直线就是我们想要的结果:
代码: https://github.com/DuRuofu/moveit2_learn/commit/d4f15d76241b578cc3732bb6a418ed352cd40721
三、编写实际的控制节点(应用)
在 my_robot_commander_cpp包新建文件 commander_template.cpp:
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
#include <example_interfaces/msg/bool.hpp>
#include <tf2/LinearMath/Quaternion.h>
using MoveGroupInterface = moveit::planning_interface::MoveGroupInterface;
class Commander
{
private:
std::shared_ptr<rclcpp::Node> node_;
std::shared_ptr<MoveGroupInterface> arm_;
std::shared_ptr<MoveGroupInterface> gripper_;
rclcpp::Subscription<example_interfaces::msg::Bool>::SharedPtr open_gripper_sub_;
/**
* @brief 通用规划与执行函数
* @param interface MoveGroupInterface 指针(arm 或 gripper)
*/
void planAndExecute(const std::shared_ptr<MoveGroupInterface> &interface)
{
MoveGroupInterface::Plan plan;
bool success = (interface->plan(plan) == moveit::core::MoveItErrorCode::SUCCESS);
if (success)
{
interface->execute(plan);
}
}
/**
* @brief 接收 /open_gripper 话题回调
*/
void OpenGripperCallback(const example_interfaces::msg::Bool::SharedPtr msg)
{
if (msg->data)
openGripper();
else
closeGripper();
}
public:
/**
* @brief 构造函数,初始化两个 MoveGroup(arm + gripper)
*/
Commander(std::shared_ptr<rclcpp::Node> node)
{
node_ = node;
arm_ = std::make_shared<MoveGroupInterface>(node_, "arm");
arm_->setMaxVelocityScalingFactor(1.0);
arm_->setMaxAccelerationScalingFactor(1.0);
gripper_ = std::make_shared<MoveGroupInterface>(node_, "gripper");
// 创建订阅者(打开/关闭手爪)
open_gripper_sub_ = node_->create_subscription<example_interfaces::msg::Bool>(
"open_gripper",
10,
std::bind(&Commander::OpenGripperCallback, this, std::placeholders::_1)
);
}
/**
* @brief 通过 MoveIt NamedTarget 运动
*/
void goToNamedTarget(const std::string &name)
{
arm_->setStartStateToCurrentState();
arm_->setNamedTarget(name);
planAndExecute(arm_);
}
/**
* @brief 通过关节角度运动
*/
void goToJointTarget(const std::vector<double> &joint_values)
{
arm_->setStartStateToCurrentState();
arm_->setJointValueTarget(joint_values);
planAndExecute(arm_);
}
/**
* @brief 通过末端位姿运动,可切换关节空间规划或笛卡尔路径
*/
void goToPoseTarget(double x, double y, double z, double roll, double pitch, double yaw, bool cartesian_path=false)
{
// 转姿态为四元数
tf2::Quaternion q;
q.setRPY(roll, pitch, yaw);
q.normalize();
geometry_msgs::msg::PoseStamped target_pose;
target_pose.header.frame_id = "base_link";
target_pose.pose.position.x = x;
target_pose.pose.position.y = y;
target_pose.pose.position.z = z;
target_pose.pose.orientation.x = q.getX();
target_pose.pose.orientation.y = q.getY();
target_pose.pose.orientation.z = q.getZ();
target_pose.pose.orientation.w = q.getW();
arm_->setStartStateToCurrentState();
if (!cartesian_path)
{
// 普通关节空间规划
arm_->setPoseTarget(target_pose);
planAndExecute(arm_);
}
else
{
// 笛卡尔路径规划
std::vector<geometry_msgs::msg::Pose> waypoints;
waypoints.push_back(target_pose.pose);
moveit_msgs::msg::RobotTrajectory trajectory;
double fraction = arm_->computeCartesianPath(
waypoints, // 路点列表
0.01, // eef_step(越小越平滑)
0.0, // jump_threshold
trajectory, // 输出轨迹
false // 不避障,可保证路径成功
);
if (fraction >= 0.9)
{
arm_->execute(trajectory);
}
else
{
RCLCPP_ERROR(node_->get_logger(), "Cartesian path planning failed (%.2f)", fraction);
}
}
}
/**
* @brief 打开手爪
*/
void openGripper()
{
gripper_->setStartStateToCurrentState();
gripper_->setNamedTarget("gripper_open");
planAndExecute(gripper_);
}
/**
* @brief 关闭手爪
*/
void closeGripper()
{
gripper_->setStartStateToCurrentState();
gripper_->setNamedTarget("gripper_closed");
planAndExecute(gripper_);
}
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("commander");
Commander commander(node);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}在package.xml里添加依赖:
<depend>example_interfaces</depend>在CMakeLists.txt里添加编译选项:
cmake_minimum_required(VERSION 3.8)
project(my_robot_commander_cpp)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(moveit_ros_planning_interface REQUIRED)
find_package(example_interfaces REQUIRED)
add_executable(test_moveit src/test_moveit.cpp)
ament_target_dependencies(test_moveit rclcpp moveit_ros_planning_interface)
add_executable(commander src/commander_template.cpp)
ament_target_dependencies(commander rclcpp example_interfaces moveit_ros_planning_interface)
install(TARGETS
test_moveit
commander
DESTINATION lib/${PROJECT_NAME}/
)
ament_package()这里的代码我就不在这里写解释了,大可复制给AI解读。在代码里我们封装了第二部分的几个方法,并且针对夹爪创建了一个布尔类型的消息订阅。可以通过open_gripper来控制夹爪状态。
编译:
cd ros2_ws
colcon build
source install/setup.bash启动launch文件
ros2 launch my_robot_bringup robot.launch.py然后执行我们编写的控制器封装:
ros2 run my_robot_commander_cpp commander正常启动:

在另一个终端发送夹爪控制指令:
ros2 topic pub -1 /open_gripper example_interfaces/msg/Bool "{data: false}"就可以看到rviz里的夹爪闭合了,这里就不放图了。
按照这个思路,我们还可以进一步,增加其他消息接口,来控制机械臂移动,代码如下:
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
#include <example_interfaces/msg/bool.hpp>
#include <example_interfaces/msg/float64_multi_array.hpp>
#include <tf2/LinearMath/Quaternion.h>
using MoveGroupInterface = moveit::planning_interface::MoveGroupInterface;
class Commander
{
private:
std::shared_ptr<rclcpp::Node> node_;
std::shared_ptr<MoveGroupInterface> arm_;
std::shared_ptr<MoveGroupInterface> gripper_;
rclcpp::Subscription<example_interfaces::msg::Bool>::SharedPtr open_gripper_sub_;
rclcpp::Subscription<example_interfaces::msg::Float64MultiArray>::SharedPtr joint_cmd_sub_;
/**
* @brief 通用规划与执行函数
* @param interface MoveGroupInterface 指针(arm 或 gripper)
*/
void planAndExecute(const std::shared_ptr<MoveGroupInterface> &interface)
{
MoveGroupInterface::Plan plan;
bool success = (interface->plan(plan) == moveit::core::MoveItErrorCode::SUCCESS);
if (success)
{
interface->execute(plan);
}
}
/**
* @brief 接收 /open_gripper 话题回调
*/
void openGripperCallback(const example_interfaces::msg::Bool::SharedPtr msg)
{
if (msg->data)
openGripper();
else
closeGripper();
}
/**
* @brief 接收 /joint_cmd 话题回调
*/
void jointCmdCallback(const example_interfaces::msg::Float64MultiArray::SharedPtr msg)
{
std::vector<double> joint_values;
if (msg->data.size()== 6)
{
goToJointTarget(msg->data);
}
}
public:
/**
* @brief 构造函数,初始化两个 MoveGroup(arm + gripper)
*/
Commander(std::shared_ptr<rclcpp::Node> node)
{
node_ = node;
arm_ = std::make_shared<MoveGroupInterface>(node_, "arm");
arm_->setMaxVelocityScalingFactor(1.0);
arm_->setMaxAccelerationScalingFactor(1.0);
gripper_ = std::make_shared<MoveGroupInterface>(node_, "gripper");
// 创建订阅者(打开/关闭手爪)
open_gripper_sub_ = node_->create_subscription<example_interfaces::msg::Bool>(
"open_gripper",
10,
std::bind(&Commander::openGripperCallback, this, std::placeholders::_1)
);
// 创建订阅者(关节角度控制)
joint_cmd_sub_ = node_->create_subscription<example_interfaces::msg::Float64MultiArray>(
"joint_command",
10,
std::bind(&Commander::jointCmdCallback, this, std::placeholders::_1)
);
}
/**
* @brief 通过 MoveIt NamedTarget 运动
*/
void goToNamedTarget(const std::string &name)
{
arm_->setStartStateToCurrentState();
arm_->setNamedTarget(name);
planAndExecute(arm_);
}
/**
* @brief 通过关节角度运动
*/
void goToJointTarget(const std::vector<double> &joint_values)
{
arm_->setStartStateToCurrentState();
arm_->setJointValueTarget(joint_values);
planAndExecute(arm_);
}
/**
* @brief 通过末端位姿运动,可切换关节空间规划或笛卡尔路径
*/
void goToPoseTarget(double x, double y, double z, double roll, double pitch, double yaw, bool cartesian_path=false)
{
// 转姿态为四元数
tf2::Quaternion q;
q.setRPY(roll, pitch, yaw);
q.normalize();
geometry_msgs::msg::PoseStamped target_pose;
target_pose.header.frame_id = "base_link";
target_pose.pose.position.x = x;
target_pose.pose.position.y = y;
target_pose.pose.position.z = z;
target_pose.pose.orientation.x = q.getX();
target_pose.pose.orientation.y = q.getY();
target_pose.pose.orientation.z = q.getZ();
target_pose.pose.orientation.w = q.getW();
arm_->setStartStateToCurrentState();
if (!cartesian_path)
{
// 普通关节空间规划
arm_->setPoseTarget(target_pose);
planAndExecute(arm_);
}
else
{
// 笛卡尔路径规划
std::vector<geometry_msgs::msg::Pose> waypoints;
waypoints.push_back(target_pose.pose);
moveit_msgs::msg::RobotTrajectory trajectory;
double fraction = arm_->computeCartesianPath(
waypoints, // 路点列表
0.01, // eef_step(越小越平滑)
0.0, // jump_threshold
trajectory, // 输出轨迹
false // 不避障,可保证路径成功
);
if (fraction >= 0.9)
{
arm_->execute(trajectory);
}
else
{
RCLCPP_ERROR(node_->get_logger(), "Cartesian path planning failed (%.2f)", fraction);
}
}
}
/**
* @brief 打开手爪
*/
void openGripper()
{
gripper_->setStartStateToCurrentState();
gripper_->setNamedTarget("gripper_open");
planAndExecute(gripper_);
}
/**
* @brief 关闭手爪
*/
void closeGripper()
{
gripper_->setStartStateToCurrentState();
gripper_->setNamedTarget("gripper_closed");
planAndExecute(gripper_);
}
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("commander");
Commander commander(node);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}这里添加了一个 joint_command 主题订阅,用于控制机器人的每个关节角度:
可以使用下面的命令测试:
ros2 topic pub -1 /joint_command example_interfaces/msg/Float64MultiArray "{data: [0.5,0.5,0.5,0.5,0.5,0.5]}"我们还可以自定义接口实现更精细的控制:
这里的细节就不描述了,都是Ros2基本功
创建接口包:
cd ros2_ws/src/
ros2 pkg create my_robot_interfaces
cd my_robot_interfaces
mkdir msg新建接口文件:
float64 x
float64 y
float64 z
float64 roll
float64 pitch
float64 yaw
bool cartesian_path编译配置:
cmake_minimum_required(VERSION 3.8)
project(my_robot_interfaces)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/PoseCommand.msg"
)
ament_export_dependencies(rosidl_default_runtime)
ament_package()最终代码如下:
https://github.com/DuRuofu/moveit2_learn/commit/8e0c21744dd3bddda38ef1f9c448c1e34c80bcf8
增加了自定义消息类型的 pose_command 接口,可以使用下面的命令测试:
ros2 topic pub -1 /pose_command my_robot_interfaces/msg/PoseCommand "{x: 0.7,y: 0.0,z: 0.4, roll: 3.14, pitch: 0.0,yaw: 0.0, cartesian_path: false}"