使用urdf构建机械臂
一、准备
新建工作空间 :
mkdir -p ~/Desktop/moveit2_learn/ros2_ws/src这里我使用moveit2_learn 作为项目文件夹,ros2_ws是ROS2的工作目录
在工作目录下建立一个功能包,用于描述机械臂:
cd ros2_ws/src
ros2 pkg create robot_description在robot_description目录下,建立一个urdf、launch、rviz文件夹:
cd robot_description
mkdir urdf launch rviz其中urdf用于存储机器人模型,launch用于编写可视化脚本,rviz里存储rviz软件的配置
在CMakelist.txt文件里添加下面的内容:
install(
DIRECTORY launch rviz urdf
DESTINATION share/${PROJECT_NAME}
)二、创建urdf文件并初步可视化
2.1 基座组件
在urdf文件夹新建arm.urdf
<?xml version="1.0"?>
<robot name="my_robot">
<material name="grey">
<color rgba="0.5 0.5 0.5 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<box size="0.4 0.4 0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
</robot>这里简单创建一个方块,先尝试预览模型。
安装下面的包urdf-tutorial:
sudo apt install ros-$ROS_DISTRO-urdf-tutorial这个包是便于我们预览模型的,不用手动编写启动文件,使用下面的命令,预览模型:
ros2 launch urdf_tutorial display.launch.py model:=/home/duruofu/project/moveit2_learn/ros2_ws/src/robot_description/urdf/arm.urdf这里注意指定自己文件真实的路径。
运行后,就能打开下面的rviz2,看到模型: 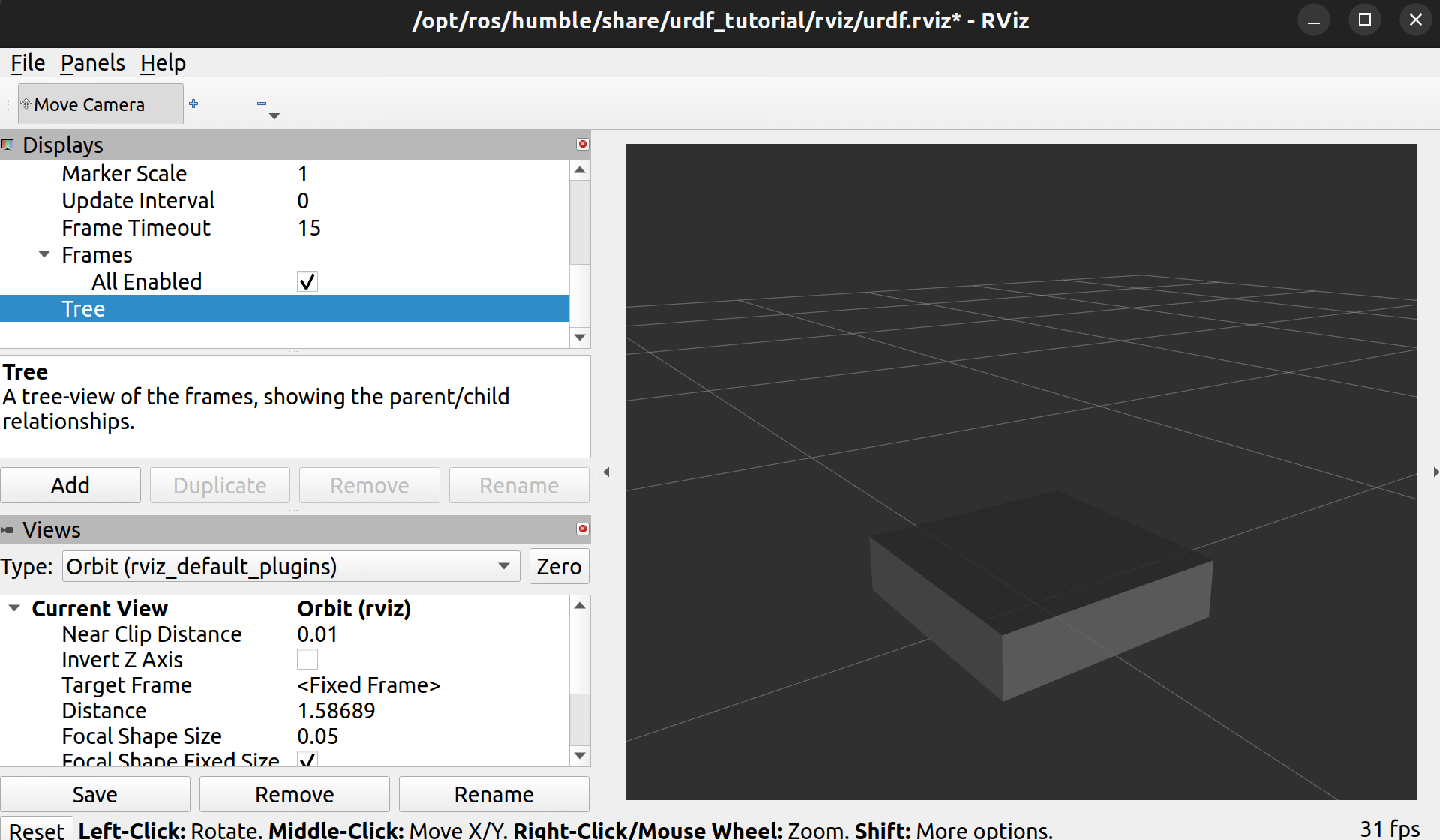
这样我们就完成了一个基本的基座。下面添加一个可以旋转的关节(肩部):
2.2 肩部关节
继续修改arm.urdf:
<?xml version="1.0"?>
<robot name="my_robot">
<material name="grey">
<color rgba="0.5 0.5 0.5 1"/>
</material>
<material name="blue">
<color rgba="0 0 0.5 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<box size="0.4 0.4 0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="shoulder_link">
<visual>
<geometry>
<cylinder length="0.5" radius="0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<material name="blue" />
</visual>
</link>
<joint name="joint1" type="revolute">
<parent link="base_link"/>
<child link="shoulder_link"/>
<origin xyz="0.0 0.0 0.1" rpy="0.0 0.0 0.0"/>
<axis xyz="0.0 0.0 1.0"/>
<limit effort="1000.0" velocity="1.0" lower="-3.14" upper="3.14"/>
</joint>
</robot>创建了肩部连杆 以及肩部和base_link之间的关节关系。
这里注意关节的参数设置:
<joint name="joint1" type="revolute">
<parent link="base_link"/>
<child link="shoulder_link"/>
<origin xyz="0.0 0.0 0.1" rpy="0.0 0.0 0.0"/>
<axis xyz="0.0 0.0 1.0"/>
<limit effort="1000.0" velocity="1.0" lower="-3.14" upper="3.14"/>
</joint>效果如下:
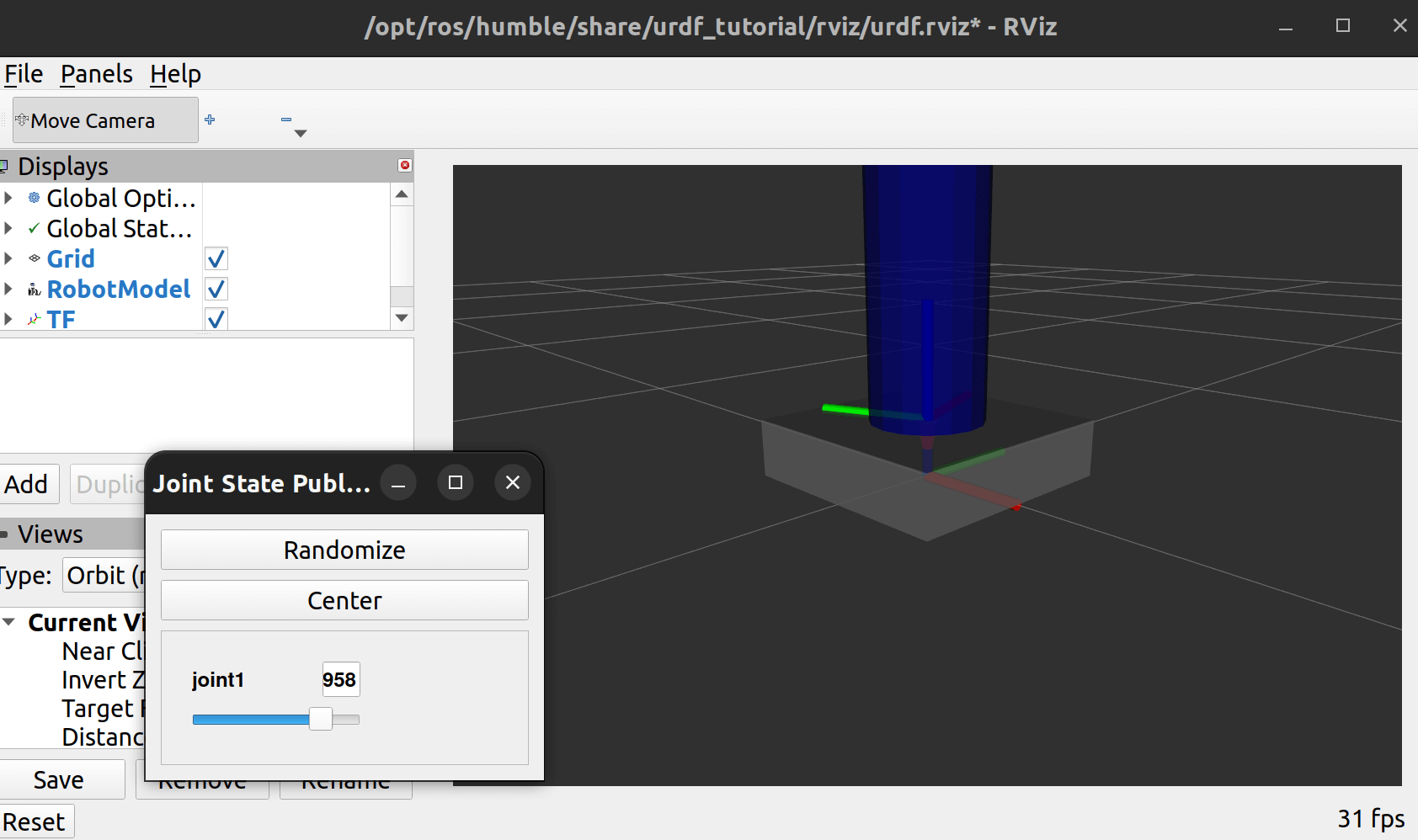
关节可以通过滑块进行转动。
2.3 其他连杆和关节
所有连杆的参数如下:
Links:
base link (box size 0.40.4 0.1)
shoulder_link (cylinder len 0.5 radius 0.1)
arm_link (cylinder len 0.6 radius 0.05)
elbow_link (cylinder len 0.1 radius 0.05)
forearm_link (cylinder len 0.5 radius 0.05)
wrist_link (box size 0.10.1 0.05)
hand_link (box size 0.10.1 0.02)
tool_link (no visual)
Joints:
joint1 (revolute,axis z,min-3.14,max 3.14)
joint2 (revolute,axis y,min 0,max 2.5)
joint3 (revolute,axis y,min 0,max 2.5)
joint4 (revolute,axis z,min -3.14,max 3.14)
joint5 (revolute,axis y,min -1.57,max 1.57)
joint6 (continuous,axis z)
hand_tool_joint (fixed)根据上面的描述,我们可以完善urdf如下:
<?xml version="1.0"?>
<robot name="my_robot">
<material name="grey">
<color rgba="0.5 0.5 0.5 1"/>
</material>
<material name="blue">
<color rgba="0 0 0.5 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<box size="0.4 0.4 0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="shoulder_link">
<visual>
<geometry>
<cylinder length="0.5" radius="0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<material name="blue" />
</visual>
</link>
<link name="arm_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.05"/>
</geometry>
<origin xyz="0.0 0.0 0.3" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="elbow_link">
<visual>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<material name="blue" />
</visual>
</link>
<link name="forearm_link">
<visual>
<geometry>
<cylinder length="0.5" radius="0.05"/>
</geometry>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="wrist_link">
<visual>
<geometry>
<box size="0.1 0.1 0.05"/>
</geometry>
<origin xyz="0.0 0.0 0.025" rpy="0.0 0.0 0.0"/>
<material name="blue" />
</visual>
</link>
<link name="hand_link">
<visual>
<geometry>
<box size="0.1 0.1 0.02"/>
</geometry>
<origin xyz="0.0 0.0 0.025" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="tool_link" />
<joint name="joint1" type="revolute">
<parent link="base_link"/>
<child link="shoulder_link"/>
<origin xyz="0.0 0.0 0.1" rpy="0.0 0.0 0.0"/>
<axis xyz="0.0 0.0 1.0"/>
<limit effort="1000.0" velocity="1.0" lower="-3.14" upper="3.14"/>
</joint>
<joint name="joint2" type="revolute">
<parent link="shoulder_link"/>
<child link="arm_link"/>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<axis xyz="0 1 0"/>
<limit effort="1000.0" velocity="1.0" lower="0" upper="2.5"/>
</joint>
<joint name="joint3" type="revolute">
<parent link="arm_link"/>
<child link="elbow_link"/>
<origin xyz="0.0 0.0 0.6" rpy="0.0 0.0 0.0"/>
<axis xyz="0 1 0"/>
<limit effort="500.0" velocity="1.0" lower="0" upper="2.5"/>
</joint>
<joint name="joint4" type="revolute">
<parent link="elbow_link"/>
<child link="forearm_link"/>
<origin xyz="0.0 0.0 0.1" rpy="0.0 0.0 0.0"/>
<axis xyz="0 0 1"/>
<limit effort="500.0" velocity="1.0" lower="-3.14" upper="3.14"/>
</joint>
<joint name="joint5" type="revolute">
<parent link="forearm_link"/>
<child link="wrist_link"/>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<axis xyz="0 1 0"/>
<limit effort="300.0" velocity="1.0" lower="-1.57" upper="1.57"/>
</joint>
<joint name="joint6" type="continuous">
<parent link="wrist_link"/>
<child link="hand_link"/>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<axis xyz="0 0 1"/>
</joint>
<joint name="hand_tool_joint" type="fixed">
<parent link="hand_link"/>
<child link="tool_link"/>
<origin xyz="0.0 0.0 0.02" rpy="0.0 0.0 0.0"/>
</joint>
</robot>最后的效果是这样的:
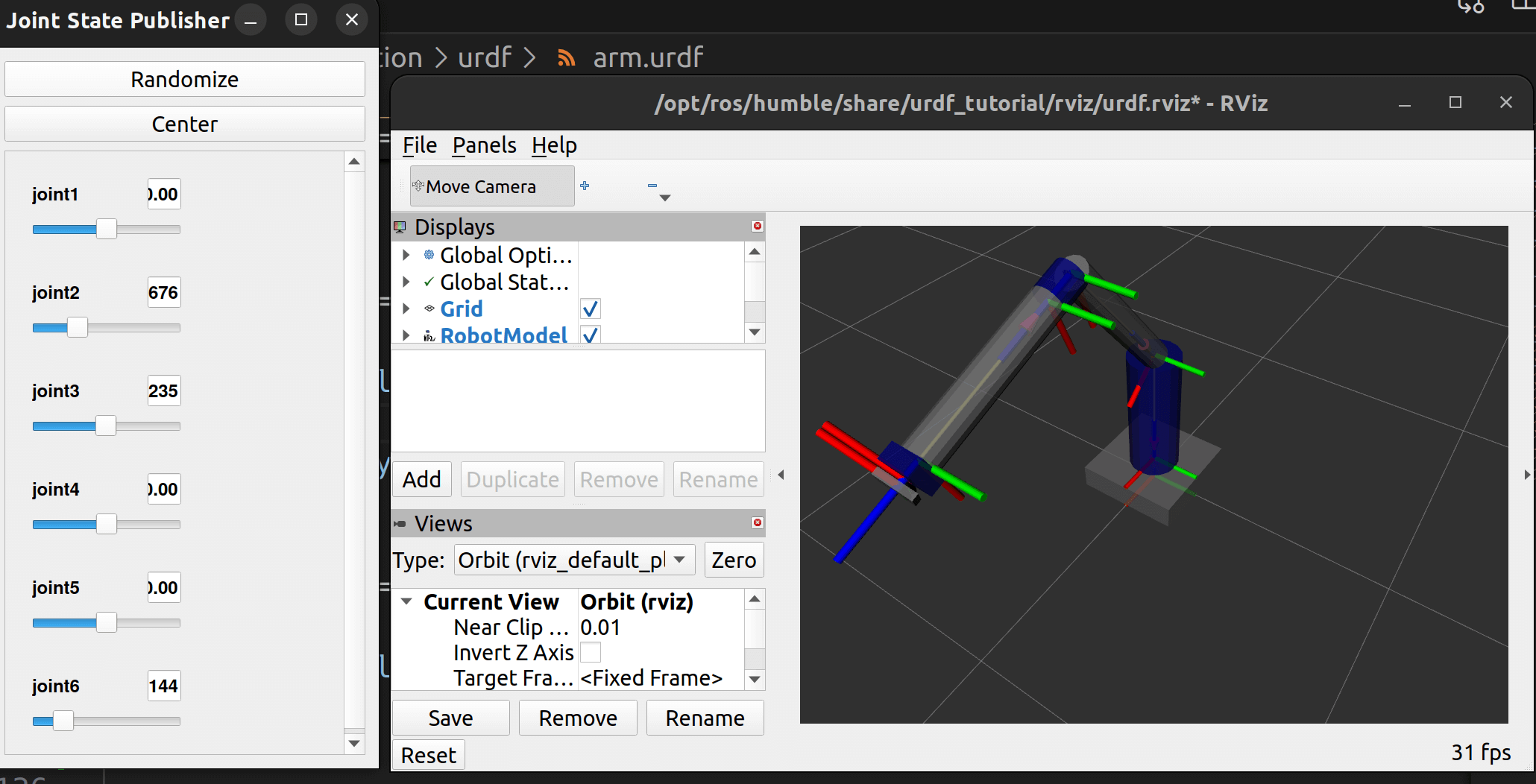
代码: https://github.com/DuRuofu/moveit2_learn/commit/d97588f00cdfc64b1f2e12f9d425949e5018ebf6
三、使用Xacro扩展urdf
在urdf文件下新建 robot.urdf.xacro,作为机器人的主体:
<?xml version="1.0"?>
<robot name="my_robot" xmlns:xacro="http://www.ros.org/wiki/xacro">
</robot>再建立一个common_properties.xacro 用于放置一些通用的标签,这里把之前定义的颜色材质挪到这个文件里来。
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<material name="grey">
<color rgba="0.5 0.5 0.5 1"/>
</material>
<material name="blue">
<color rgba="0 0 0.5 1"/>
</material>
</robot>然后在robot.urdf.xacro 中引用通用属性:
<?xml version="1.0"?>
<robot name="my_robot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="common_properties.xacro"/>
</robot>修改原来的arm.urdf改为arm.xacro:
这里仅仅删除了通用材质和 robot标签的机器人名字属性,这个属性全局唯一,已经在robot.urdf.xacro里定义了。
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<link name="base_link">
<visual>
<geometry>
<box size="0.4 0.4 0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="shoulder_link">
<visual>
<geometry>
<cylinder length="0.5" radius="0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<material name="blue" />
</visual>
</link>
<link name="arm_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.05"/>
</geometry>
<origin xyz="0.0 0.0 0.3" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="elbow_link">
<visual>
<geometry>
<cylinder length="0.1" radius="0.05"/>
</geometry>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<material name="blue" />
</visual>
</link>
<link name="forearm_link">
<visual>
<geometry>
<cylinder length="0.5" radius="0.05"/>
</geometry>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="wrist_link">
<visual>
<geometry>
<box size="0.1 0.1 0.05"/>
</geometry>
<origin xyz="0.0 0.0 0.025" rpy="0.0 0.0 0.0"/>
<material name="blue" />
</visual>
</link>
<link name="hand_link">
<visual>
<geometry>
<box size="0.1 0.1 0.02"/>
</geometry>
<origin xyz="0.0 0.0 0.025" rpy="0.0 0.0 0.0"/>
<material name="grey" />
</visual>
</link>
<link name="tool_link" />
<joint name="joint1" type="revolute">
<parent link="base_link"/>
<child link="shoulder_link"/>
<origin xyz="0.0 0.0 0.1" rpy="0.0 0.0 0.0"/>
<axis xyz="0.0 0.0 1.0"/>
<limit effort="1000.0" velocity="1.0" lower="-3.14" upper="3.14"/>
</joint>
<joint name="joint2" type="revolute">
<parent link="shoulder_link"/>
<child link="arm_link"/>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<axis xyz="0 1 0"/>
<limit effort="1000.0" velocity="1.0" lower="0" upper="2.5"/>
</joint>
<joint name="joint3" type="revolute">
<parent link="arm_link"/>
<child link="elbow_link"/>
<origin xyz="0.0 0.0 0.6" rpy="0.0 0.0 0.0"/>
<axis xyz="0 1 0"/>
<limit effort="500.0" velocity="1.0" lower="0" upper="2.5"/>
</joint>
<joint name="joint4" type="revolute">
<parent link="elbow_link"/>
<child link="forearm_link"/>
<origin xyz="0.0 0.0 0.1" rpy="0.0 0.0 0.0"/>
<axis xyz="0 0 1"/>
<limit effort="500.0" velocity="1.0" lower="-3.14" upper="3.14"/>
</joint>
<joint name="joint5" type="revolute">
<parent link="forearm_link"/>
<child link="wrist_link"/>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<axis xyz="0 1 0"/>
<limit effort="300.0" velocity="1.0" lower="-1.57" upper="1.57"/>
</joint>
<joint name="joint6" type="continuous">
<parent link="wrist_link"/>
<child link="hand_link"/>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<axis xyz="0 0 1"/>
</joint>
<joint name="hand_tool_joint" type="fixed">
<parent link="hand_link"/>
<child link="tool_link"/>
<origin xyz="0.0 0.0 0.02" rpy="0.0 0.0 0.0"/>
</joint>
</robot>然后在robot.urdf.xacro 中引用机械臂文件:
<?xml version="1.0"?>
<robot name="my_robot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="common_properties.xacro"/>
<xacro:include filename="arm.xacro"/>
</robot>再次预览模型,这次改用调用robot.urdf.xacro 文件:
ros2 launch urdf_tutorial display.launch.py model:=/home/duruofu/project/moveit2_learn/ros2_ws/src/robot_description/urdf/robot.urdf.xacro也是可以正常显示的:
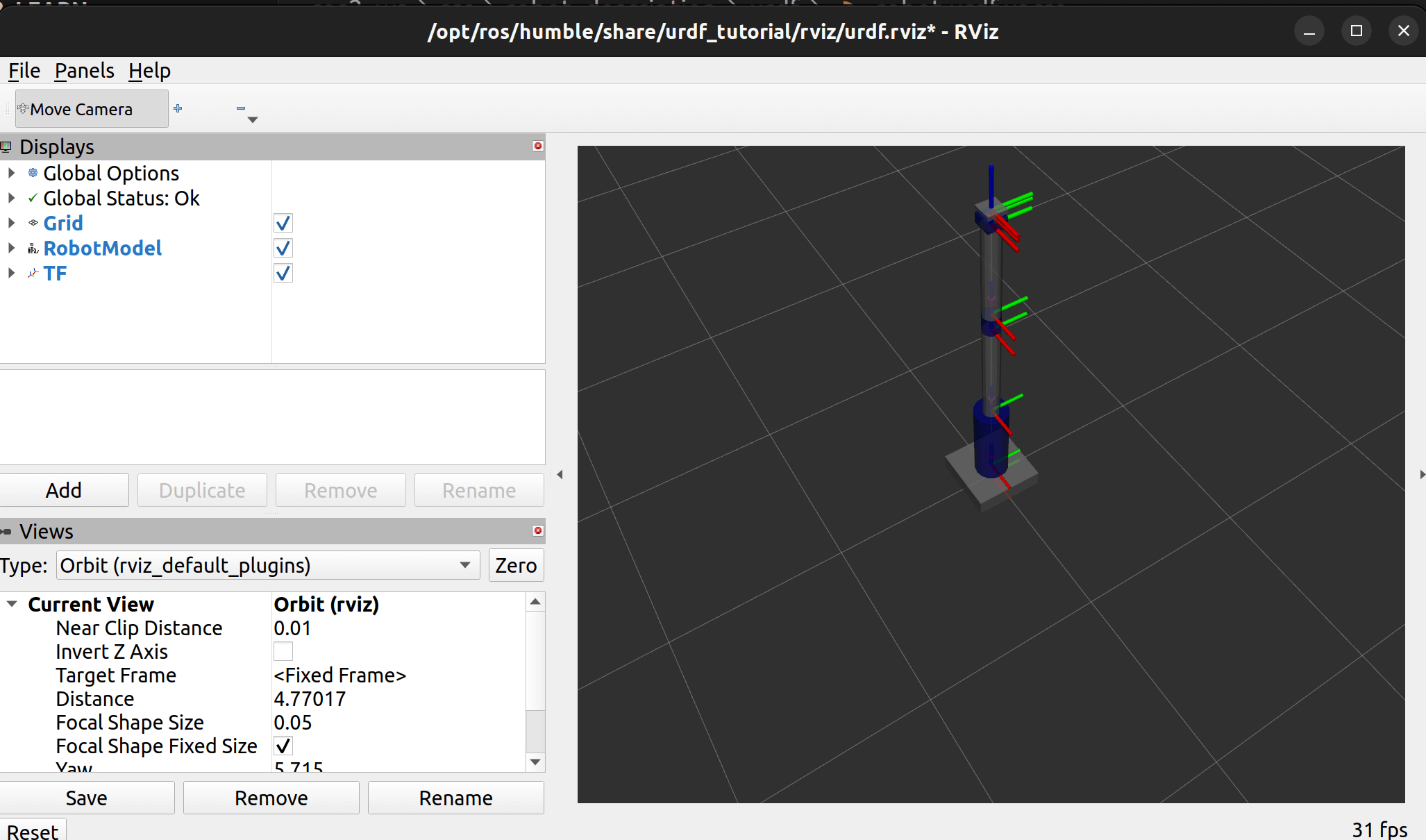
代码: https://github.com/DuRuofu/moveit2_learn/commit/41afb21ac60329f8e2f33dae5e952f92b1a6e7bc
四、使用启动文件发布urdf
在launch文件夹下新建:display.launch.xml(也可以使用python ,看个人喜好);
<launch>
<let name="urdf_path"
value="$(find-pkg-share robot_description)/urdf/robot.urdf.xacro"/>
<node pkg="robot_state_publisher" exec="robot_state_publisher">
<param name="robot_description"
value="$(command 'xacro $(var urdf_path)')"/>
</node>
<node pkg="joint_state_publisher_gui" exec="joint_state_publisher_gui"/>
<node pkg="rviz2" exec="rviz2" output="screen"/>
</launch>这段代码是一个 ROS1 的 launch 文件(使用了 XML 格式)用于启动一些常见的 ROS 节点,用来加载 URDF 文件、发布机器人状态、并在 RViz 中显示机器人模型。下面是代码的详细解释:
<let name="urdf_path" value="..."/>这行定义了一个名为urdf_path的变量,表示 URDF 文件的路径。$(find-pkg-share robot_description)是一种 ROS1 方式,它会根据robot_description包的位置,找到该包中的urdf/robot.urdf.xacro文件。 这个文件是描述机器人模型的 Xacro 格式的 URDF 文件。<node pkg="robot_state_publisher" exec="robot_state_publisher">启动一个robot_state_publisher节点,这个节点的作用是将机器人的状态(即关节角度等)发布到 ROS 话题上供其他节点使用。 在这里,我们传递robot_description参数,它包含了机器人的 URDF(或者 Xacro)描述。 具体来说,xacro命令会将urdf_path中指定的 Xacro 文件解析成 URDF 格式并传递给robot_state_publisher。<node pkg="joint_state_publisher_gui" exec="joint_state_publisher_gui"/>启动一个joint_state_publisher_gui节点,它提供了一个图形界面来控制机器人的关节状态。用户可以通过这个界面来手动调整机器人各个关节的角度,发布到 ROS 系统。<node pkg="rviz2" exec="rviz2" output="screen"/>启动rviz2节点,这是 ROS2 中的可视化工具,用于显示机器人的模型、传感器数据、状态等。 启动后,rviz2会自动打开一个窗口,显示机器人的 URDF 模型,用户可以在此环境中进行交互和调试。
当然,也可以使用python编写,如下:
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
from launch.substitutions import Command, FindExecutable
def generate_launch_description():
# 获取 robot_description 包的 share 目录路径
robot_description_share_dir = get_package_share_directory('robot_description')
# 拼接 URDF 文件路径
urdf_path = os.path.join(robot_description_share_dir, 'urdf', 'robot.urdf.xacro')
# 创建 launch description
# 使用 Command + FindExecutable 来执行 xacro 并把输出作为 robot_description 参数
robot_description_cmd = Command([FindExecutable(name='xacro'), ' ', urdf_path])
return LaunchDescription([
# 启动 robot_state_publisher 节点,传递 robot_description 参数(机器人的 URDF)
Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='screen',
parameters=[{'robot_description': robot_description_cmd}]
),
# 启动 joint_state_publisher_gui 节点,用于显示关节控制 GUI
Node(
package='joint_state_publisher_gui',
executable='joint_state_publisher_gui',
name='joint_state_publisher_gui',
output='screen'
),
# 启动 rviz2 节点,用于可视化机器人模型
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen'
),
])编译运行:
cd ros2_ws
colcon build
source install/setup.bash
ros2 launch robot_description display.launch.xml是可以正常显示的(需要在rviz里手动添加) 
至此,我们完成了机械臂原型的构建工作。
代码: https://github.com/DuRuofu/moveit2_learn/commit/d30e6cc52d9a3aeb564ac60804377ee3705d0f18