添加末端执行器
一、构建末端执行器URDF
在机器人描述包里,新建文件: gripper.xacro
xml
<?xml version="1.0"?>
<robot name="temp" xmlns:xacro="http://www.ros.org/wiki/xacro">
<material name="dark_green">
<color rgba="0 0.4 0 1.0"/>
</material>
<material name="light_green">
<color rgba="0 0.6 0 1.0"/>
</material>
<link name="gripper_base_link">
<visual>
<geometry>
<box size="0.2 0.06 0.02"/>
</geometry>
<origin rpy="0 0 0.01" xyz="0 0 0"/>
<material name="dark_green"/>
</visual>
<collision>
<geometry>
<box size="0.2 0.06 0.02"/>
</geometry>
<origin rpy="0 0 0.01" xyz="0 0 0"/>
</collision>
</link>
<link name="gripper_left_finger_link">
<visual>
<geometry>
<box size="0.02 0.06 0.08"/>
</geometry>
<origin rpy="0 0 0.0" xyz="0 0 0.04"/>
<material name="light_green"/>
</visual>
<collision>
<geometry>
<box size="0.02 0.06 0.08"/>
</geometry>
<origin rpy="0 0 0.0" xyz="0 0 0.04"/>
</collision>
</link>
<link name="gripper_right_finger_link">
<visual>
<geometry>
<box size="0.02 0.06 0.08"/>
</geometry>
<origin rpy="0 0 0.0" xyz="0 0 0.04"/>
<material name="light_green"/>
</visual>
<collision>
<geometry>
<box size="0.02 0.06 0.08"/>
</geometry>
<origin rpy="0 0 0.0" xyz="0 0 0.04"/>
</collision>
</link>
<joint name="gripper_left_finger_joint" type="prismatic">
<parent link="gripper_base_link"/>
<child link="gripper_left_finger_link"/>
<origin xyz="-0.07 0.0 0.02" rpy="0.0 0.0 0.0"/>
<axis xyz="1 0 0"/>
<limit lower="0.0" upper="0.06" effort="1000" velocity="0.0"/>
</joint>
<joint name="gripper_right_finger_joint" type="prismatic">
<parent link="gripper_base_link"/>
<child link="gripper_right_finger_link"/>
<origin xyz="0.07 0.0 0.02" rpy="0.0 0.0 0.0"/>
<axis xyz="1 0 0"/>
<mimic joint="gripper_left_finger_joint" multiplier="-1"/>
<limit lower="-0.06" upper="0" effort="1000" velocity="0.0"/>
</joint>
</robot>预览如下: 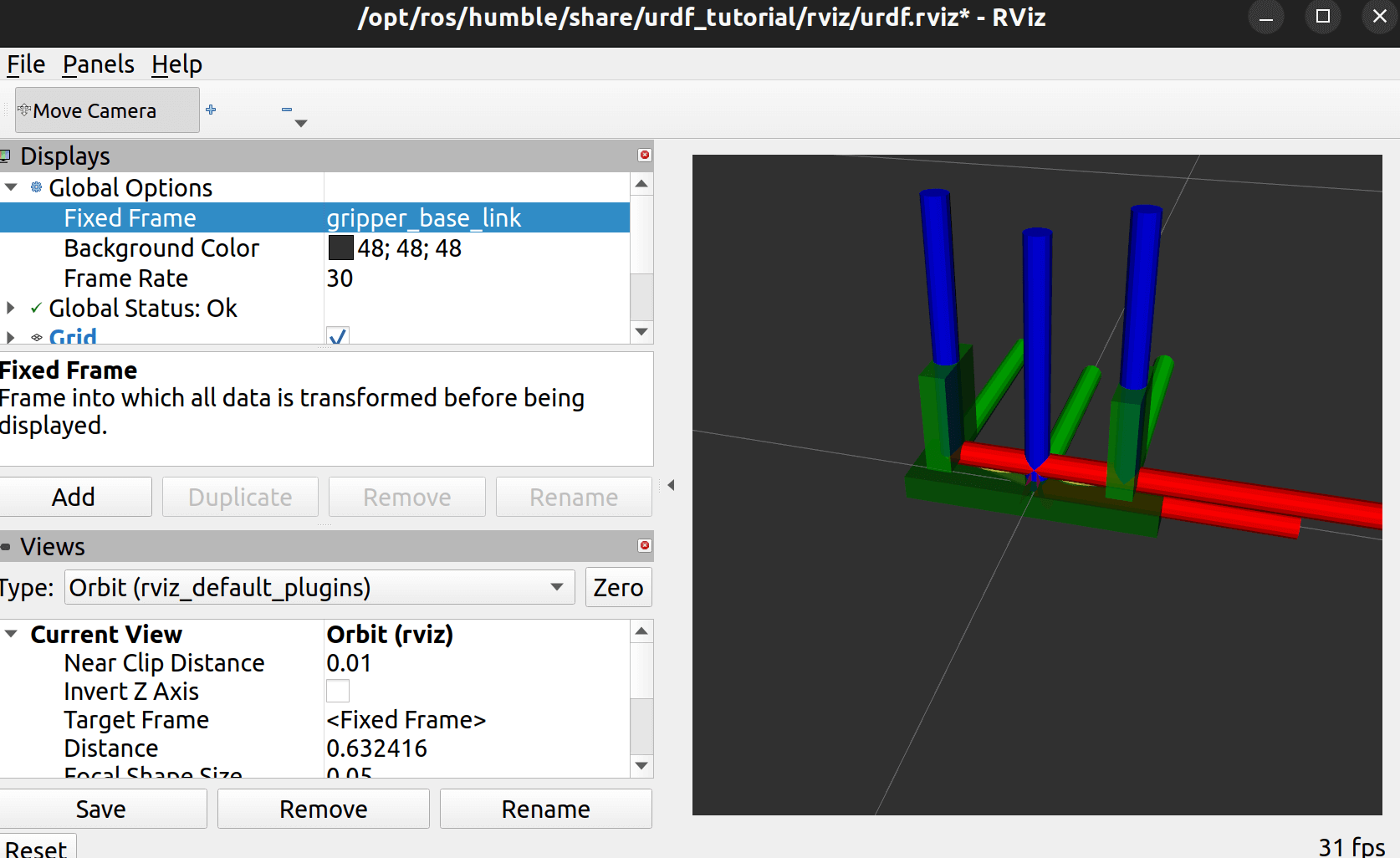
二、连接执行器到机械臂
修改机械臂主文件robot.urdf.xacro,添加末端执行器绑定:
xml
<?xml version="1.0"?>
<robot name="my_robot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="common_properties.xacro"/>
<xacro:include filename="arm.xacro"/>
<xacro:include filename="gripper.xacro"/>
<joint name="gripper_base_joint" type="fixed">
<parent link="tool_link"/>
<child link="gripper_base_link"/>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</joint>
</robot>这里通过将 tool_link 和 gripper_base_link连接 完成末端执行器和机械臂本身的连接。
预览如下: 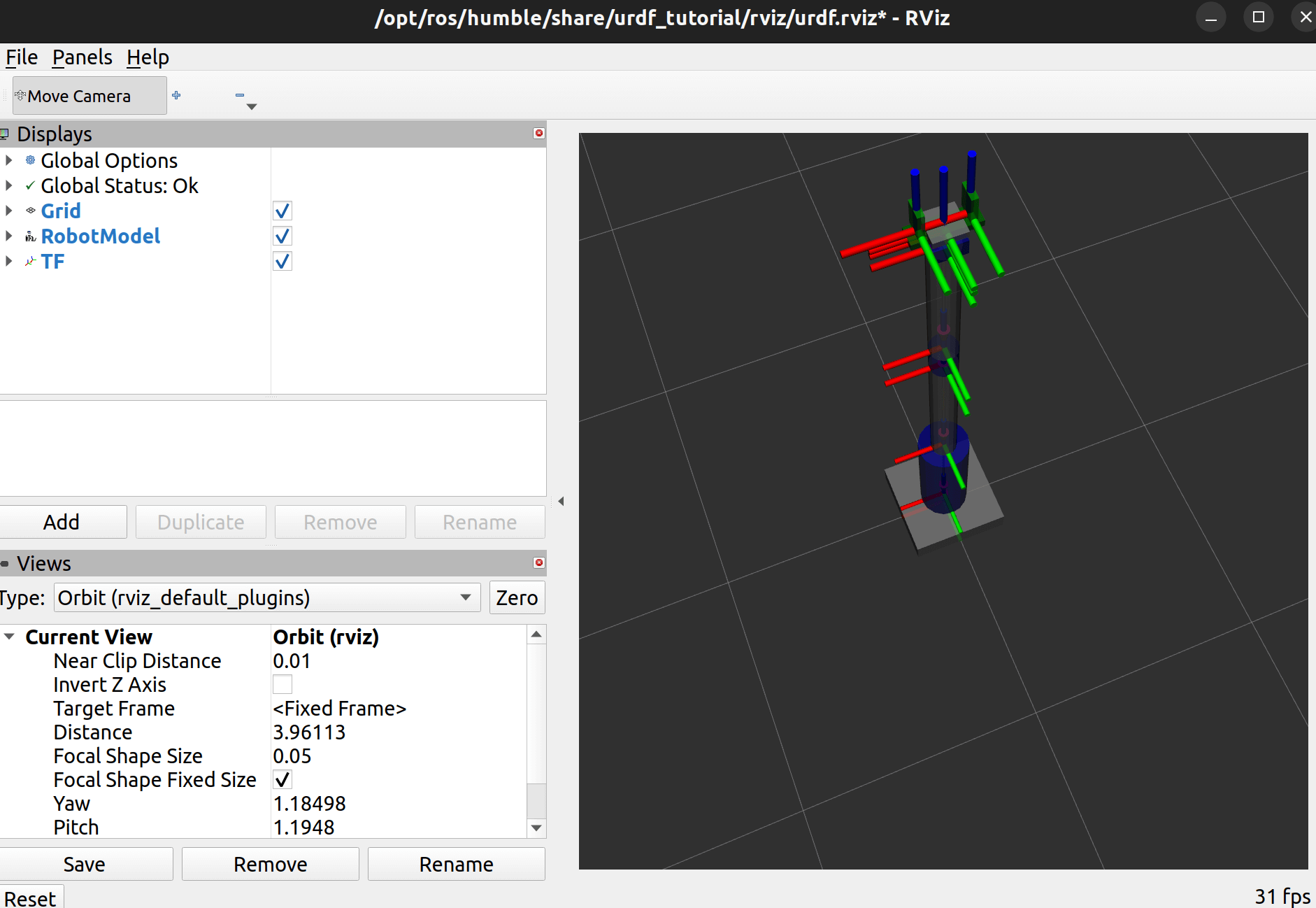
代码: https://github.com/DuRuofu/moveit2_learn/commit/3cacfdd2af1e41d78979fdf99bbb4c3834fd75b5
三、配置Moveit2
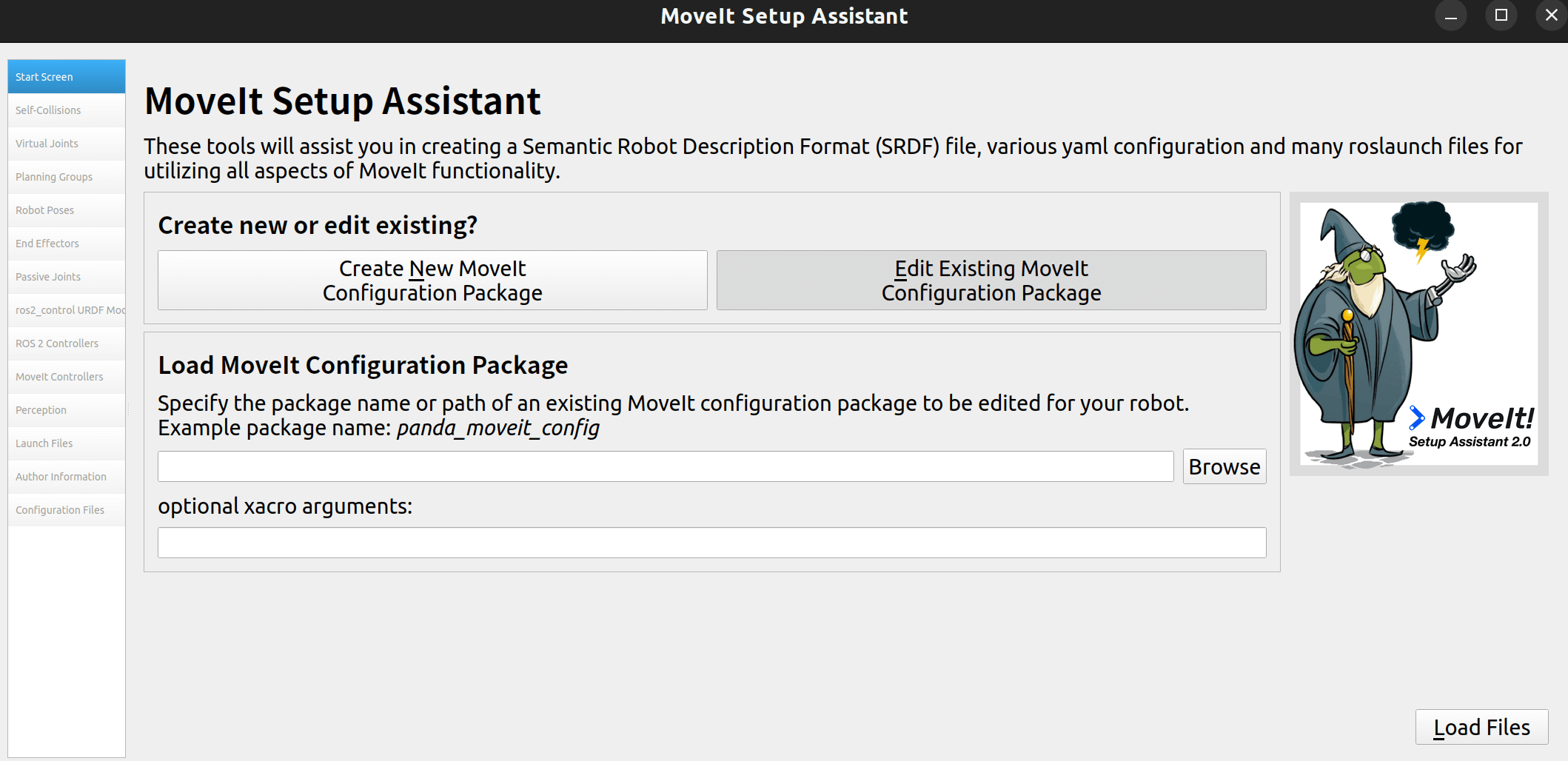
我们启动Moveit2 配置助手(在工作区目录下启动):
ros2 launch moveit_setup_assistant setup_assistant.launch.py选择编辑现有配置:
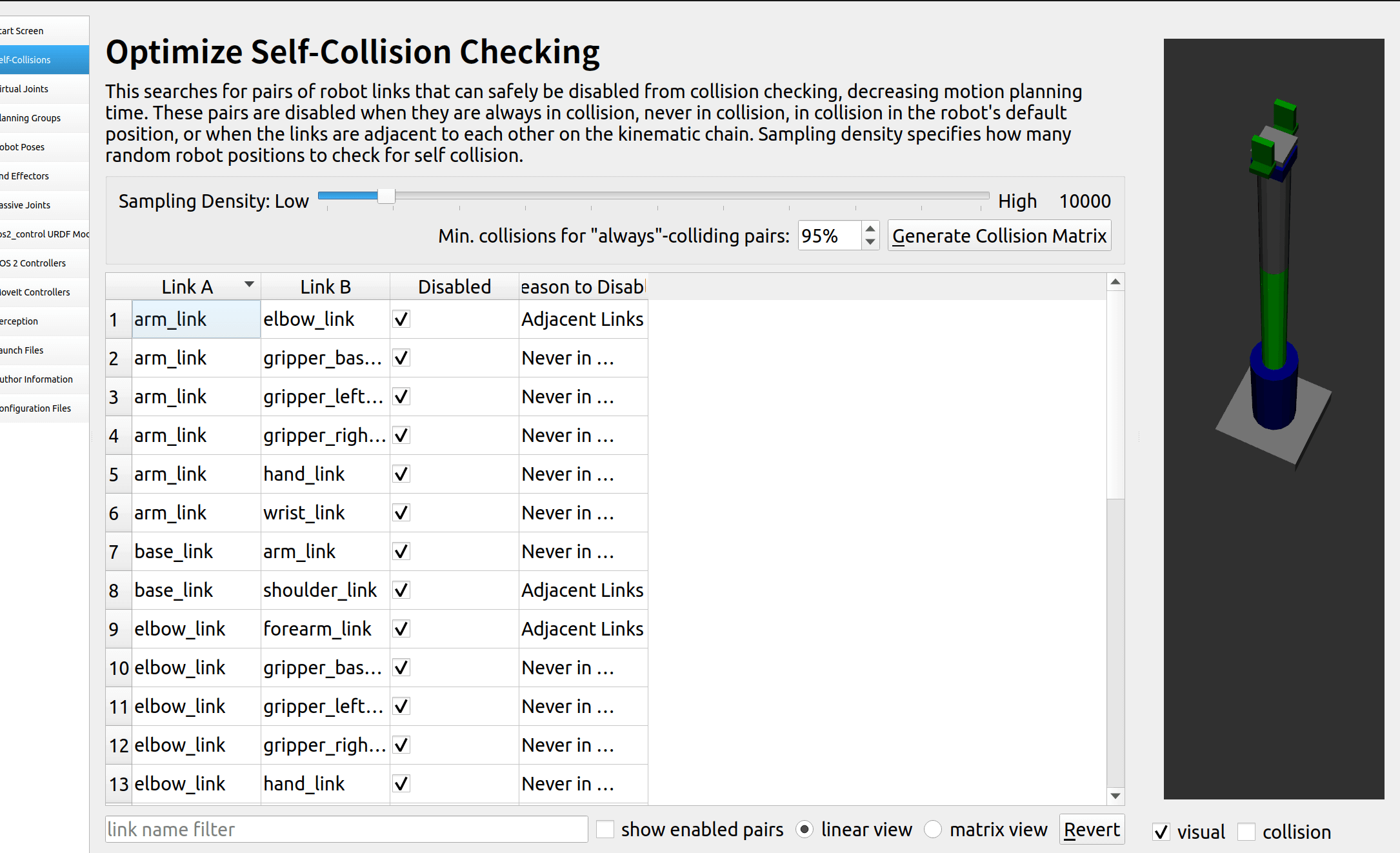
加载上一节生成的配置包,首先重新生成碰撞矩阵:
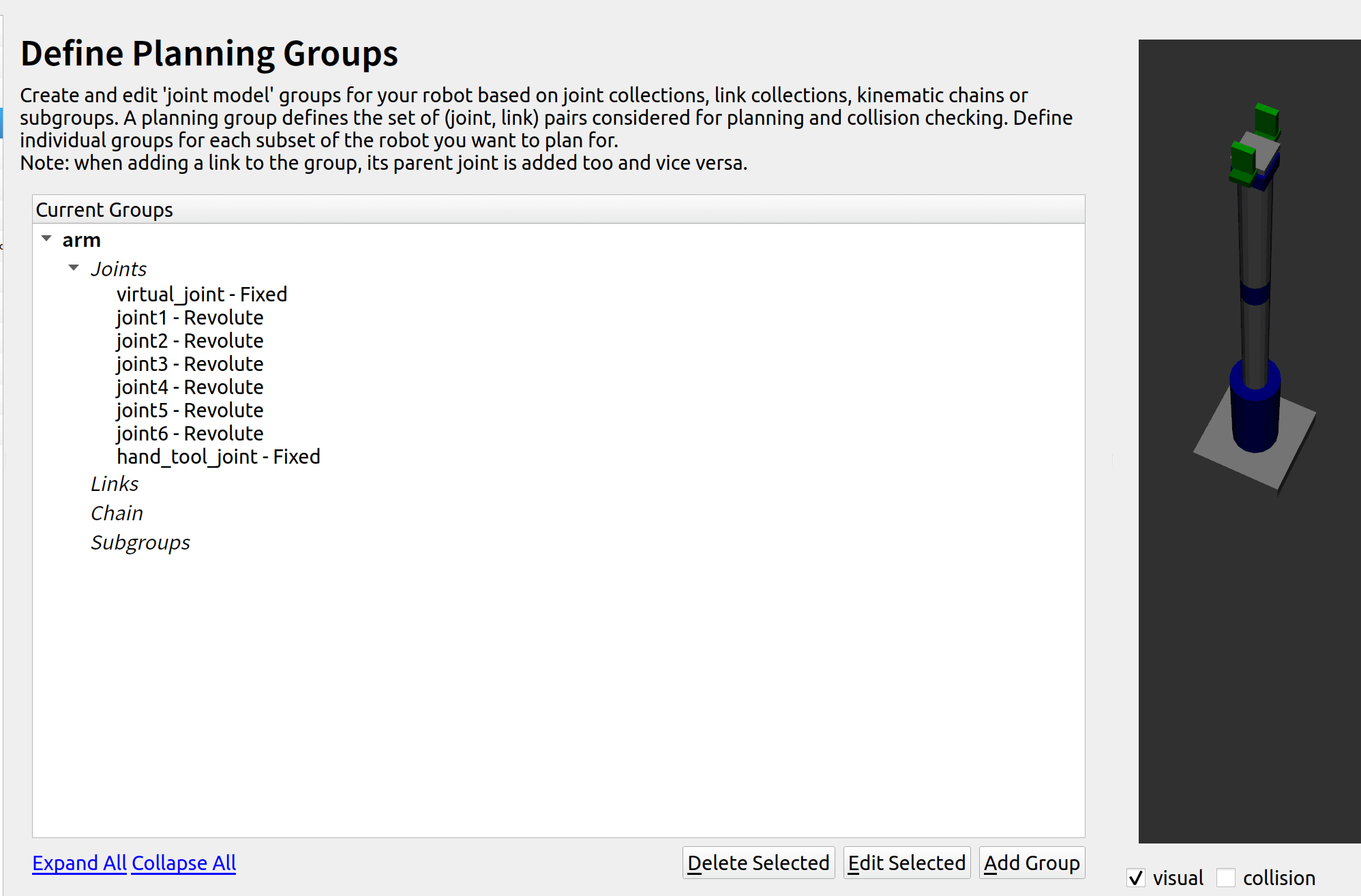
添加新的规划组:
添加夹爪对应的关节: 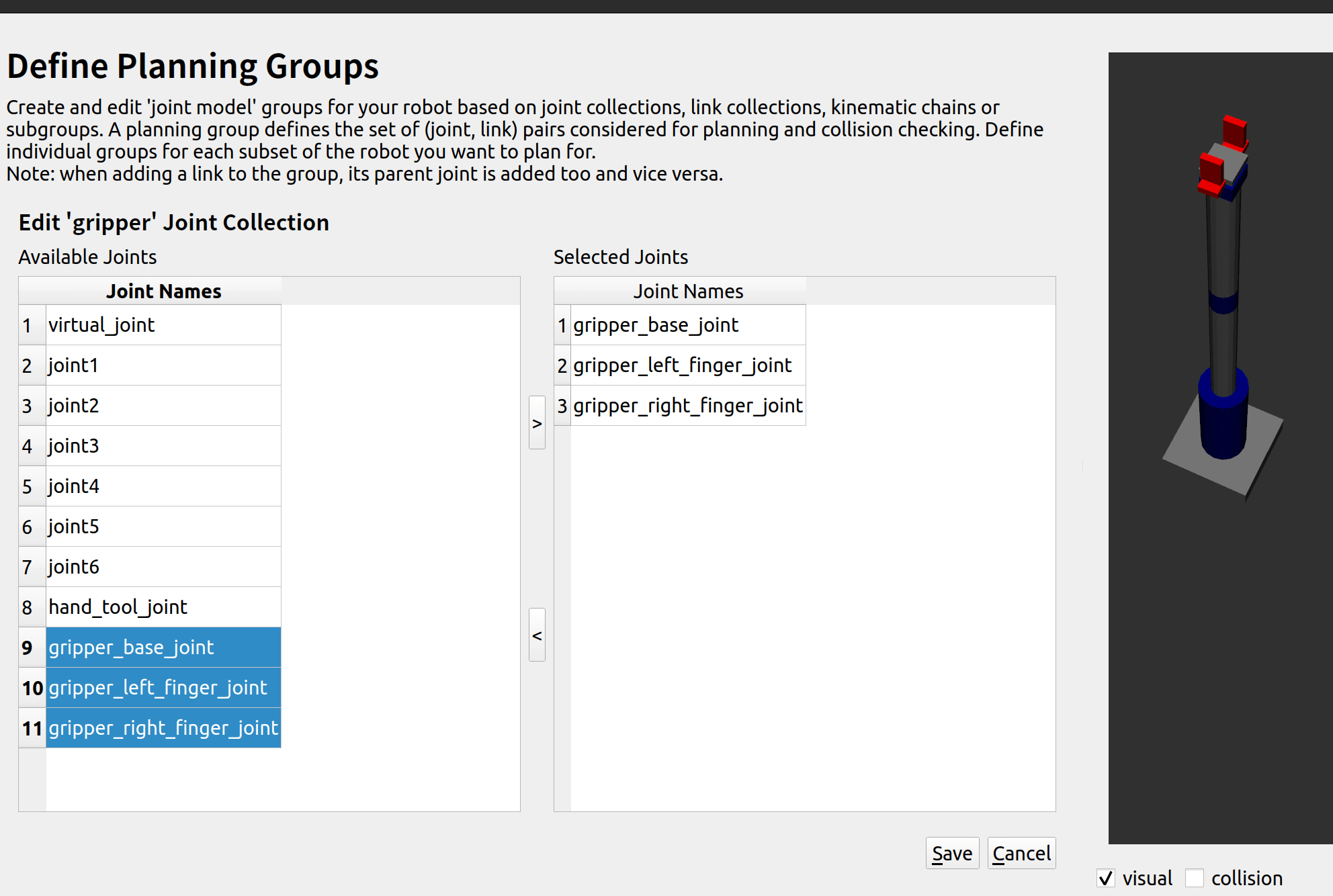
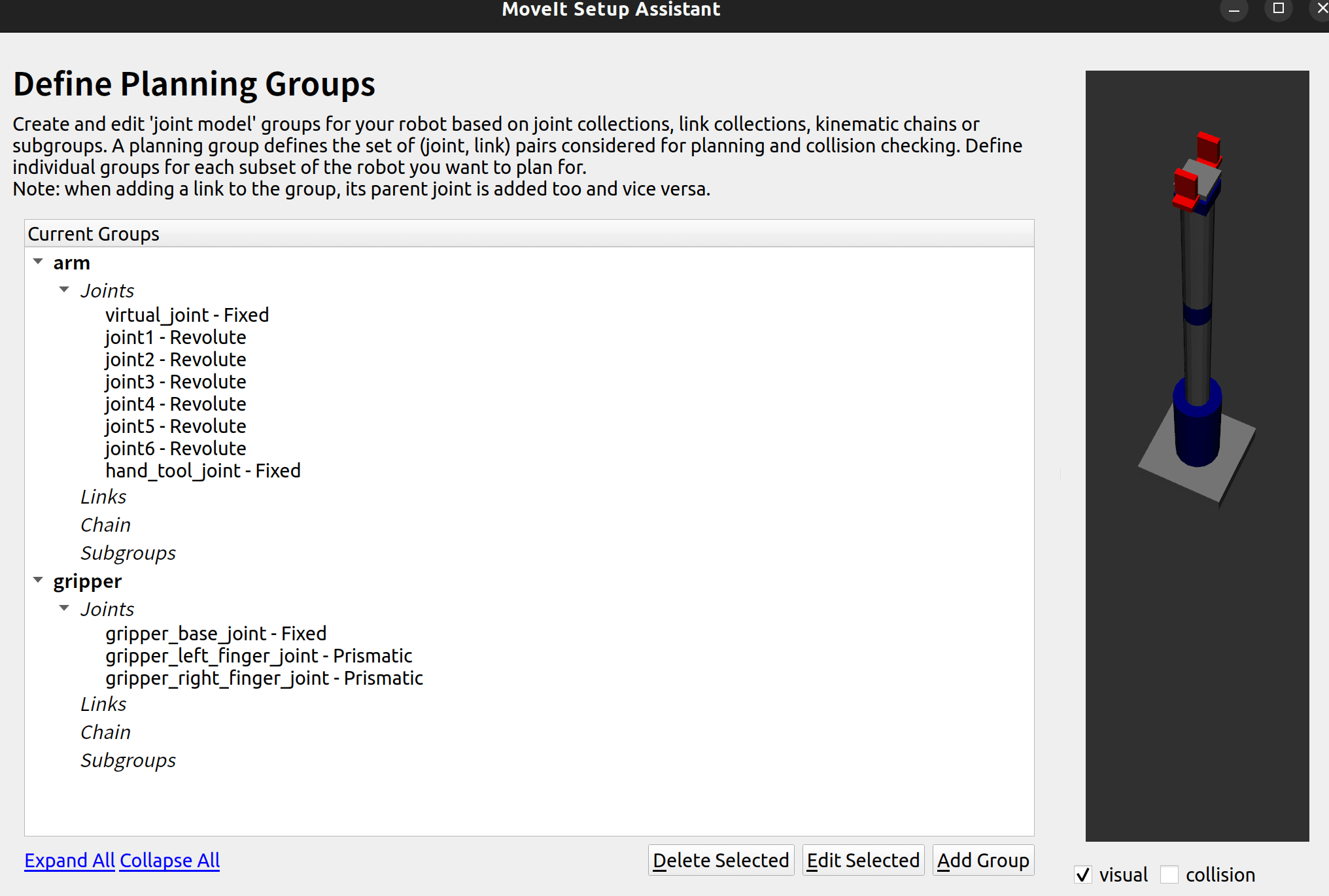
最终我们拥有两个规划组,如下。
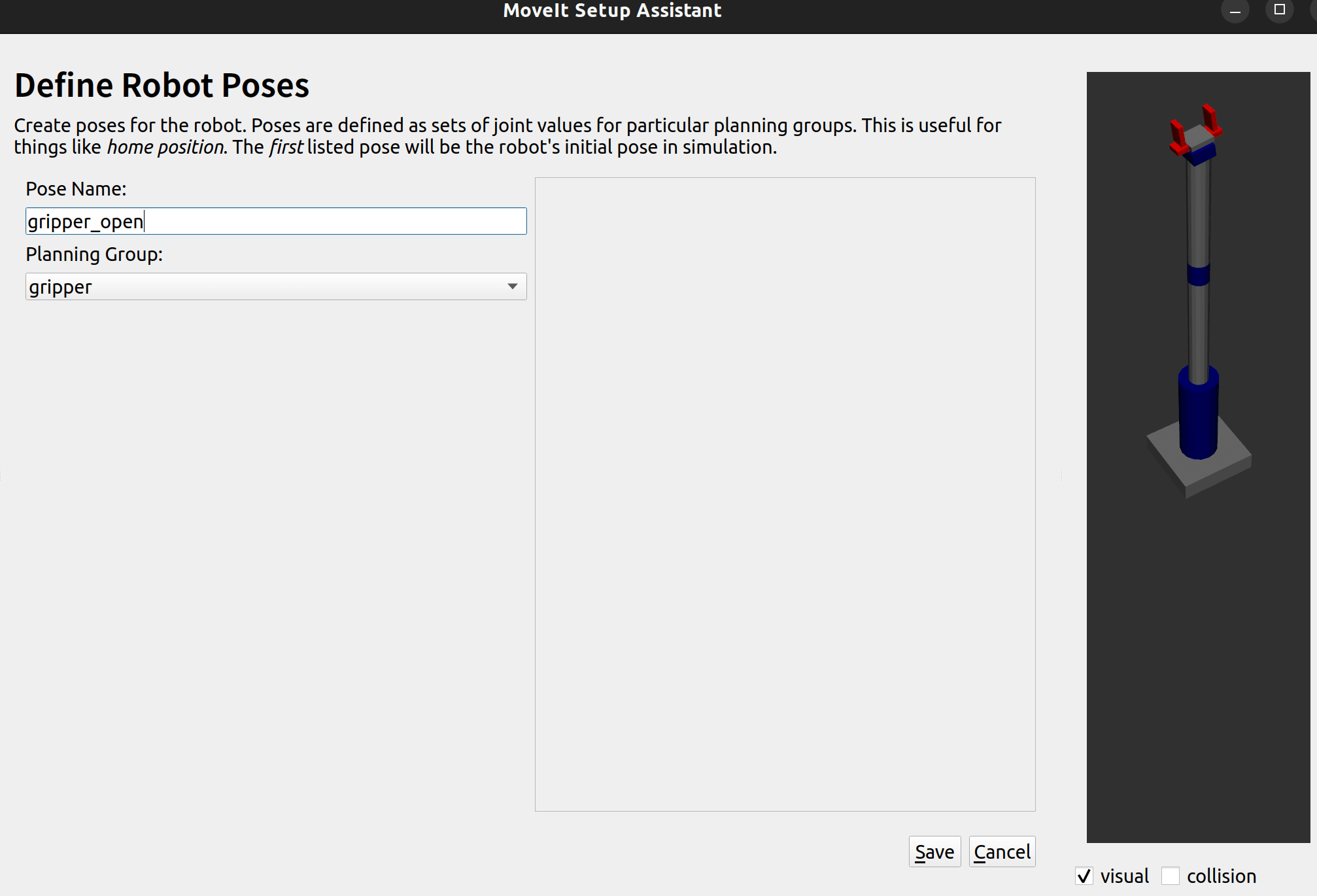
添加夹爪姿态,我这里的Ui显示有问题,只能添加初始状态(后续在配置文件里手动添加):
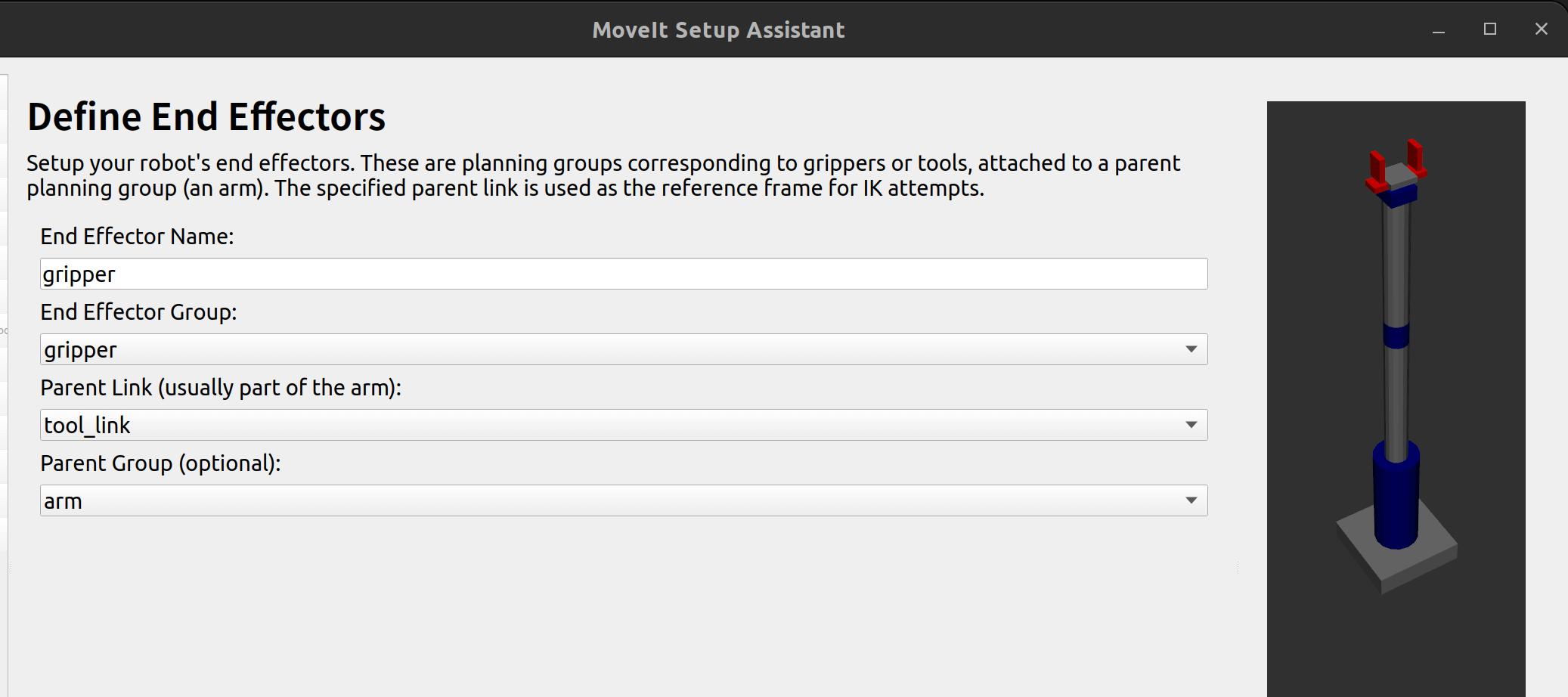
定义末端执行器:
点击添加接口: 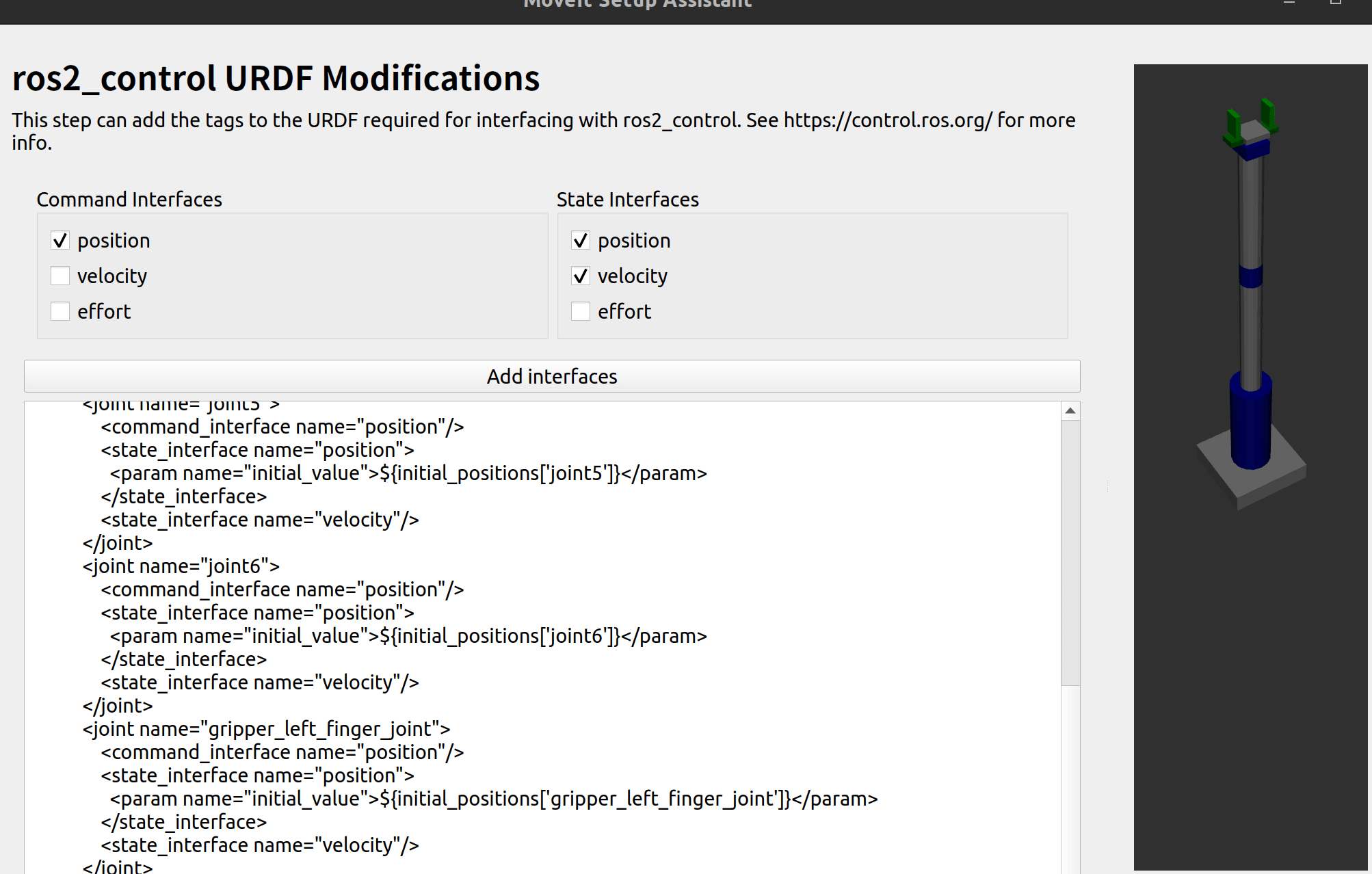
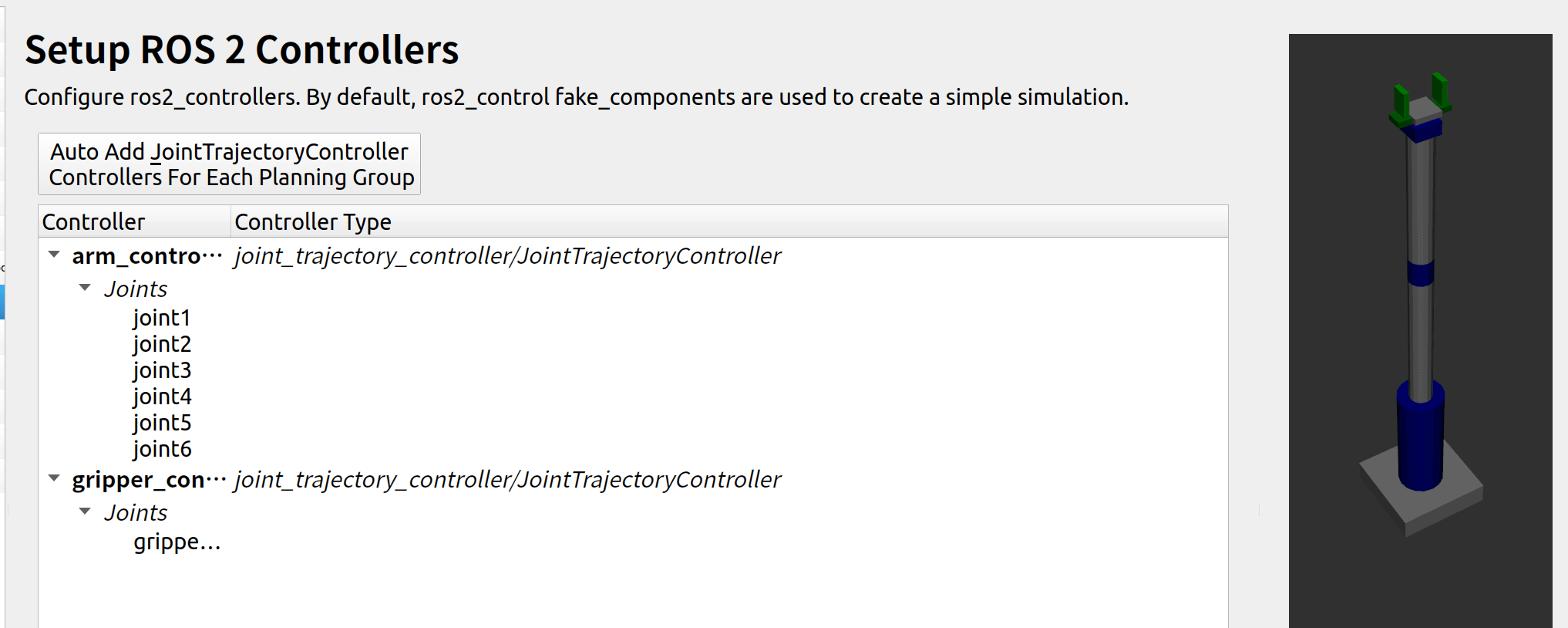
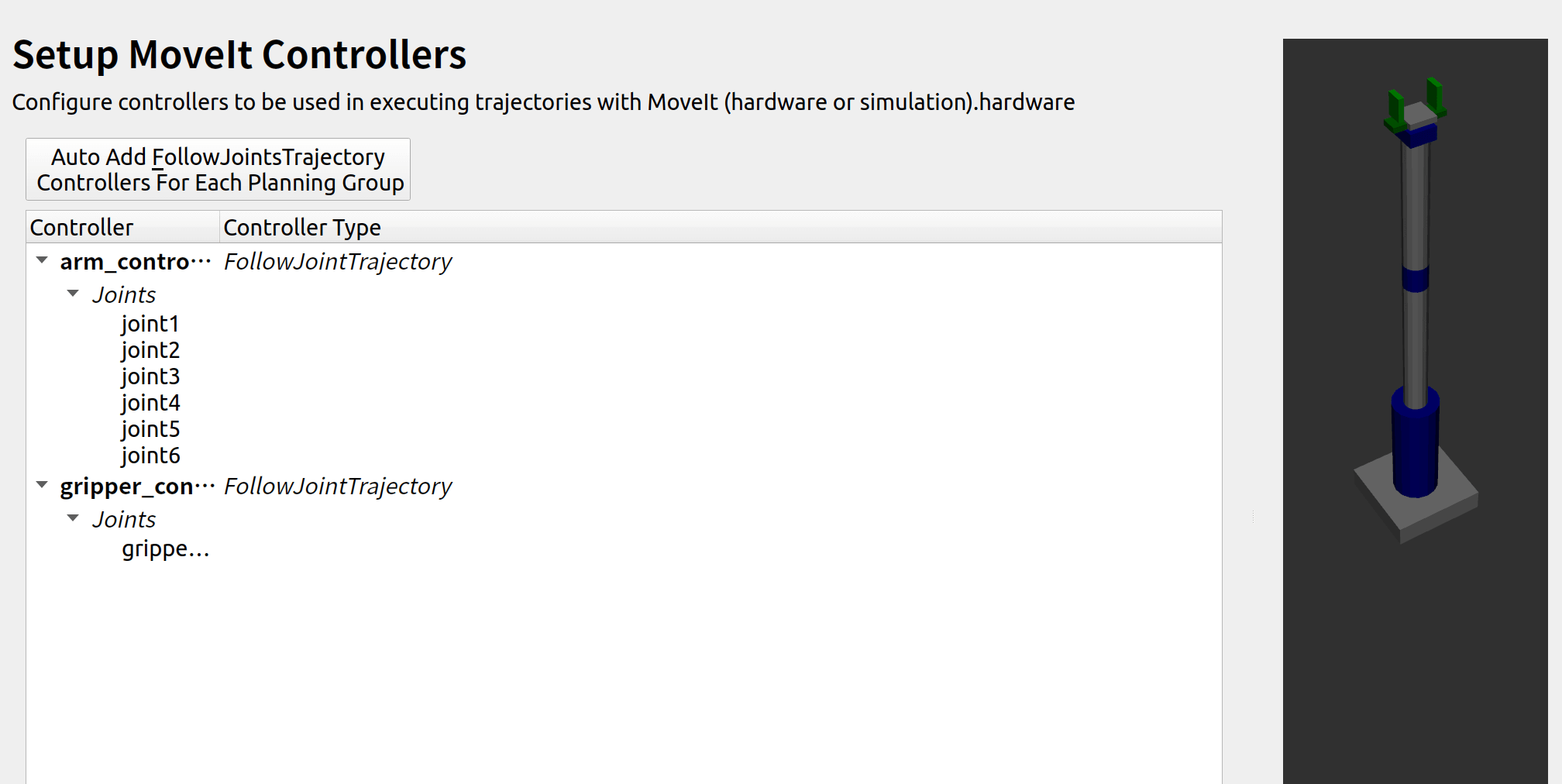
点击自动添加控制器:
重新生成包: 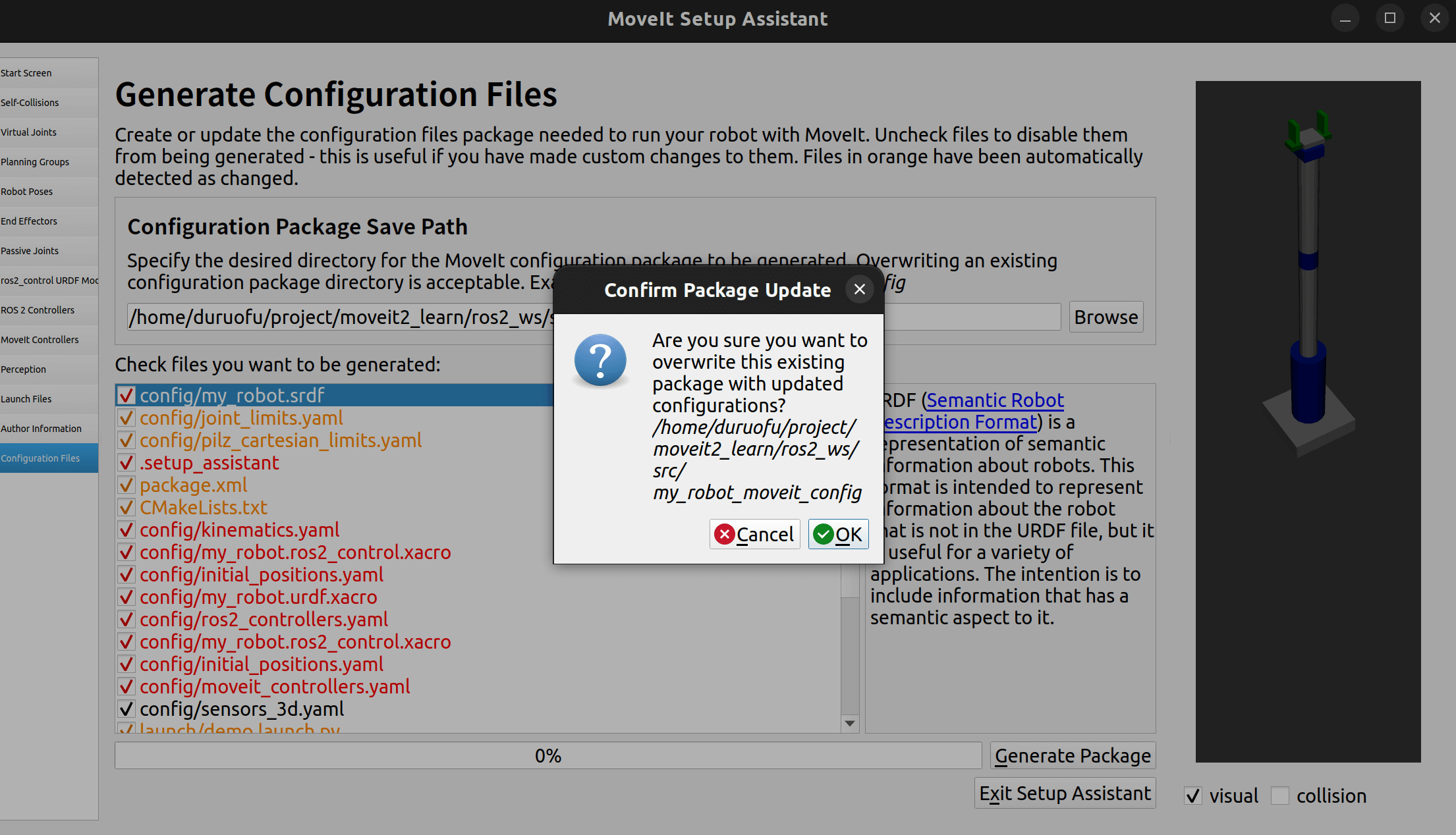
生成完成后,我们还需要手动修复一些文件:
首先是joint_limits.yaml:
yaml
# joint_limits.yaml allows the dynamics properties specified in the URDF to be overwritten or augmented as needed
# For beginners, we downscale velocity and acceleration limits.
# You can always specify higher scaling factors (<= 1.0) in your motion requests. # Increase the values below to 1.0 to always move at maximum speed.
default_velocity_scaling_factor: 0.1
default_acceleration_scaling_factor: 0.1
# Specific joint properties can be changed with the keys [max_position, min_position, max_velocity, max_acceleration]
# Joint limits can be turned off with [has_velocity_limits, has_acceleration_limits]
joint_limits:
gripper_left_finger_joint:
has_velocity_limits: true
max_velocity: 1.0
has_acceleration_limits: true
max_acceleration: 1.0
gripper_right_finger_joint:
has_velocity_limits: true
max_velocity: 1.0
has_acceleration_limits: true
max_acceleration: 1.0
joint1:
has_velocity_limits: true
max_velocity: 1.0
has_acceleration_limits: true
max_acceleration: 1.0
joint2:
has_velocity_limits: true
max_velocity: 1.0
has_acceleration_limits: true
max_acceleration: 1.0
joint3:
has_velocity_limits: true
max_velocity: 1.0
has_acceleration_limits: true
max_acceleration: 1.0
joint4:
has_velocity_limits: true
max_velocity: 1.0
has_acceleration_limits: true
max_acceleration: 1.0
joint5:
has_velocity_limits: true
max_velocity: 1.0
has_acceleration_limits: true
max_acceleration: 1.0
joint6:
has_velocity_limits: true
max_velocity: 1.0
has_acceleration_limits: true
max_acceleration: 1.0在my_robot.srdf里手动添加夹爪位置定义:
xml
<group_state name="gripper_open" group="gripper">
<joint name="gripper_left_finger_joint" value="0"/>
</group_state>
<group_state name="gripper_closed" group="gripper">
<joint name="gripper_left_finger_joint" value="0.06"/>
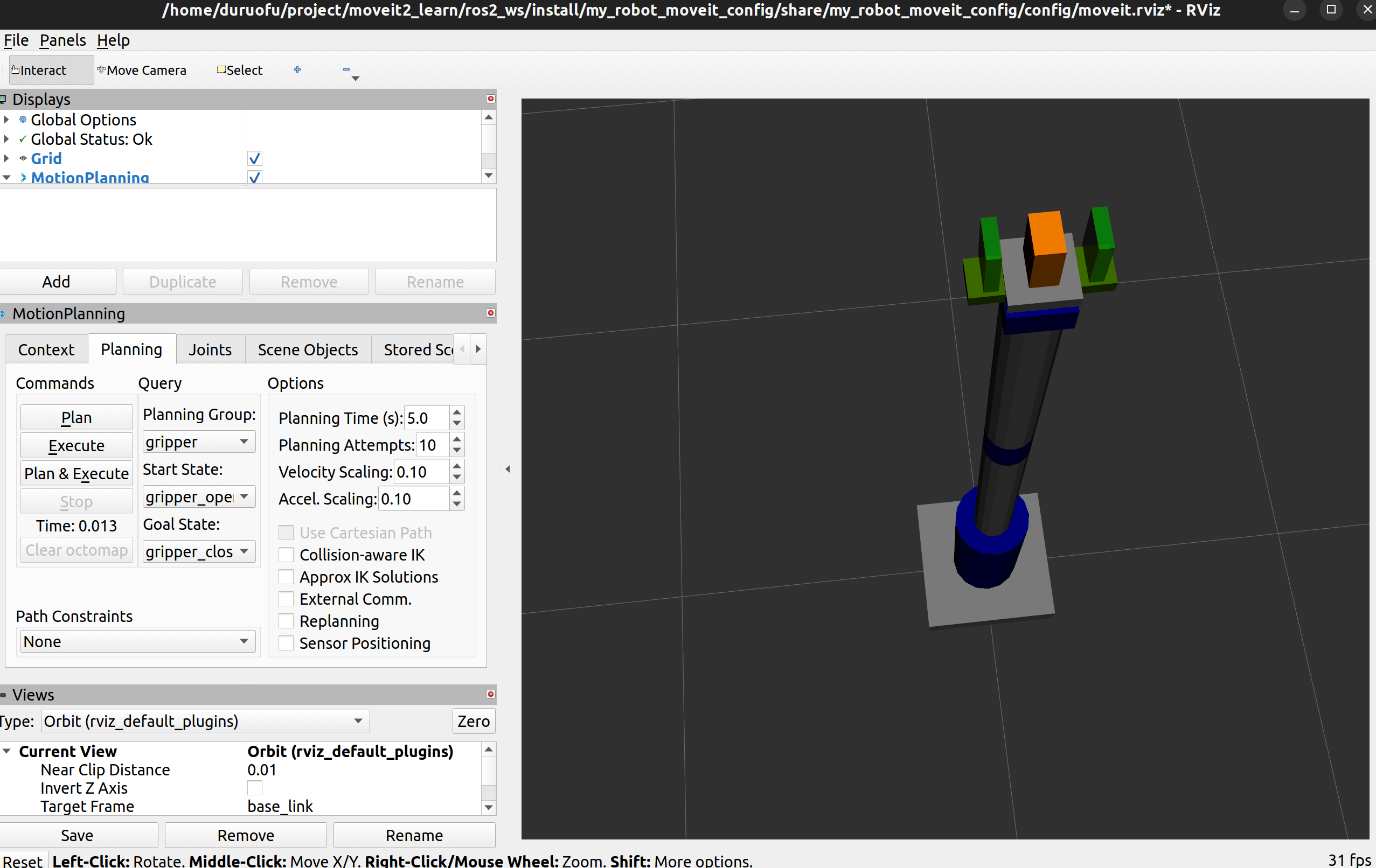
</group_state>然后尝试运行demo:
bash
cd ros2_ws
colcon build
source install/setup.bash
ros2 launch my_robot_moveit_config demo.launch.py可以正常对夹爪进行运动规划:
关于末端执行器的添加到此为止
代码: https://github.com/DuRuofu/moveit2_learn/commit/388995569c5b80ac8d8b05914b9ad36acff15f7d