ROS2与仿真环境搭建
一、简介
本章节将介绍如何搭建ROS2开发环境和Gazebo仿真环境。关于搭建开发环境可以看这篇博客:Ubuntu_22_04_ROS2安装
本次项目我们依旧使用 Ubuntu22.04 和对应的ROS2 - Humble Hawksbill
二、准备虚拟机环境
首先我们需要一台安装了 Ubuntu22.04 的虚拟机,或者是使用Windows上的WSL也OK。在这个教程里,使用Windows11下的WSL2来创建Ubuntu22.04虚拟环境。至于具体的虚拟机怎么安装,WSL2怎么安装,这里不再详细说明,网上都有很多很好的教程。
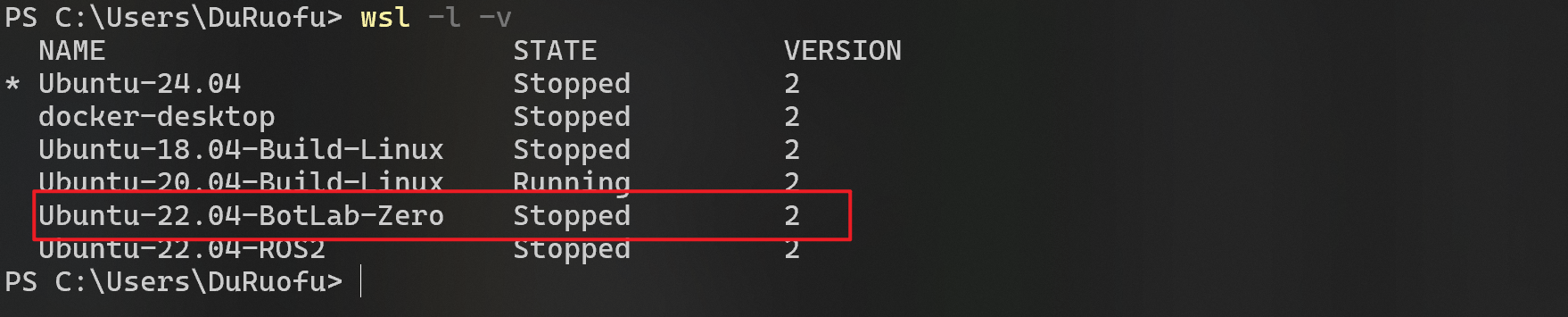
在前期的仿真阶段我们先使用WSL或者虚拟机即可,这里我准备了一台 Ubuntu22.04 的WSL2虚拟机,名字叫Ubuntu-22.04-BotLab-Zero,如下图:
三、安装ROS2
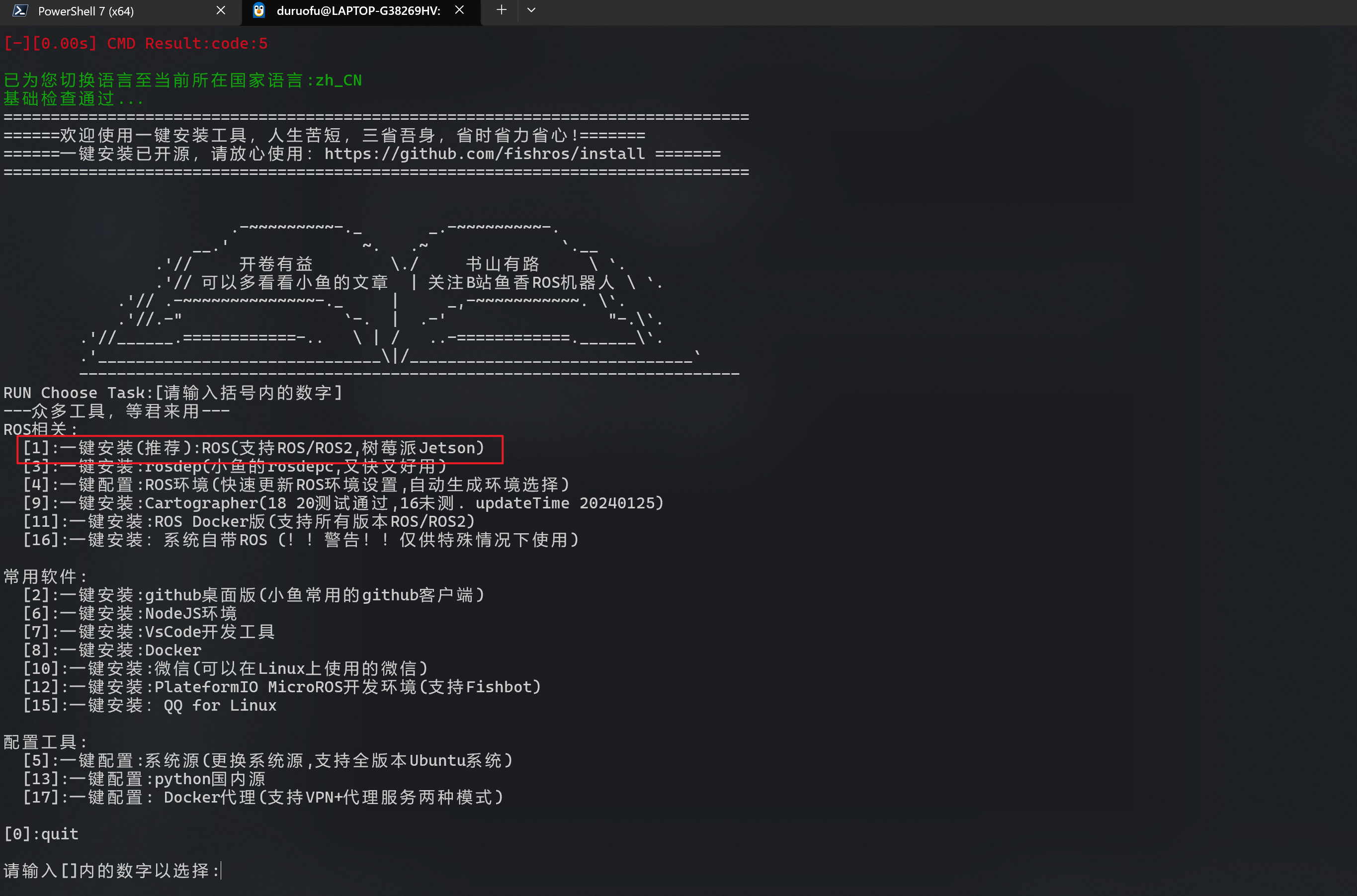
在Linux终端里使用鱼香ROS的一键安装脚本:
bash
wget http://fishros.com/install -O fishros && bash fishros选择安装ROS:
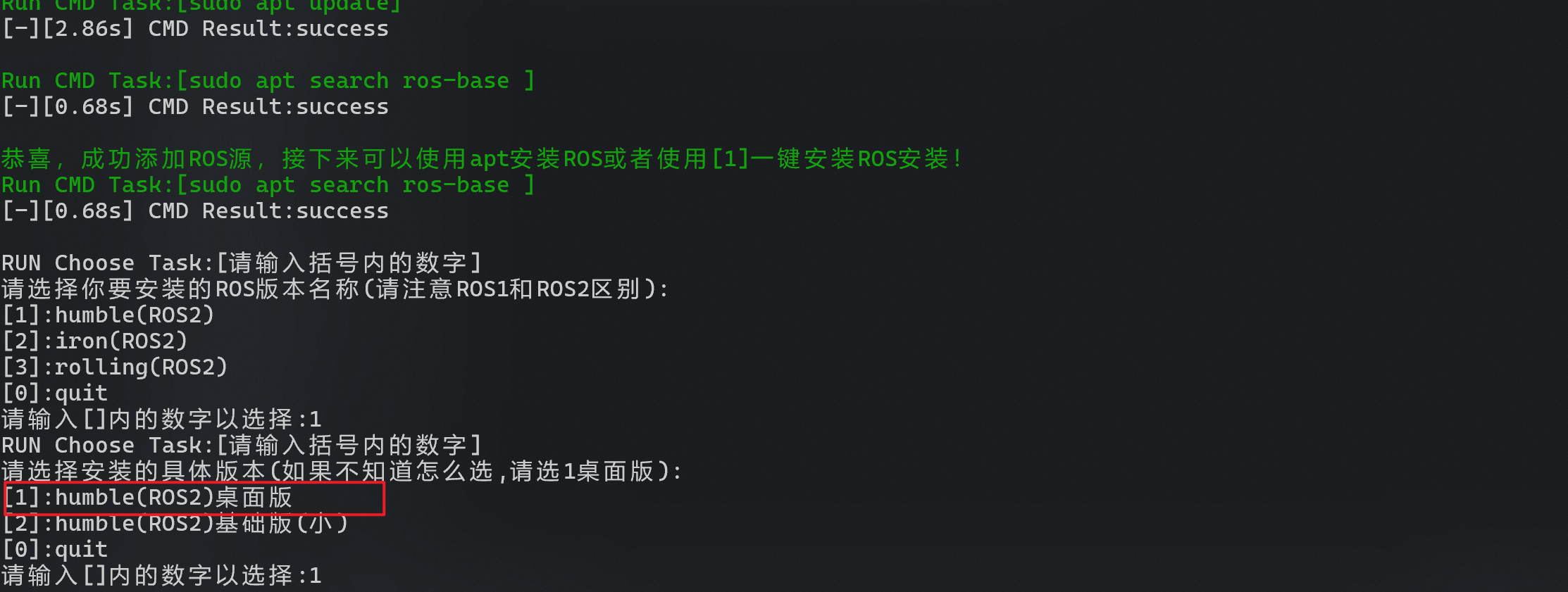
安装humble(ROS2)桌面版:
中途不报错,安装完成如下:
使用命令source ~/.bashrc重新加载环境,使用ros2命令检验安装成功:
四、测试ROS环境
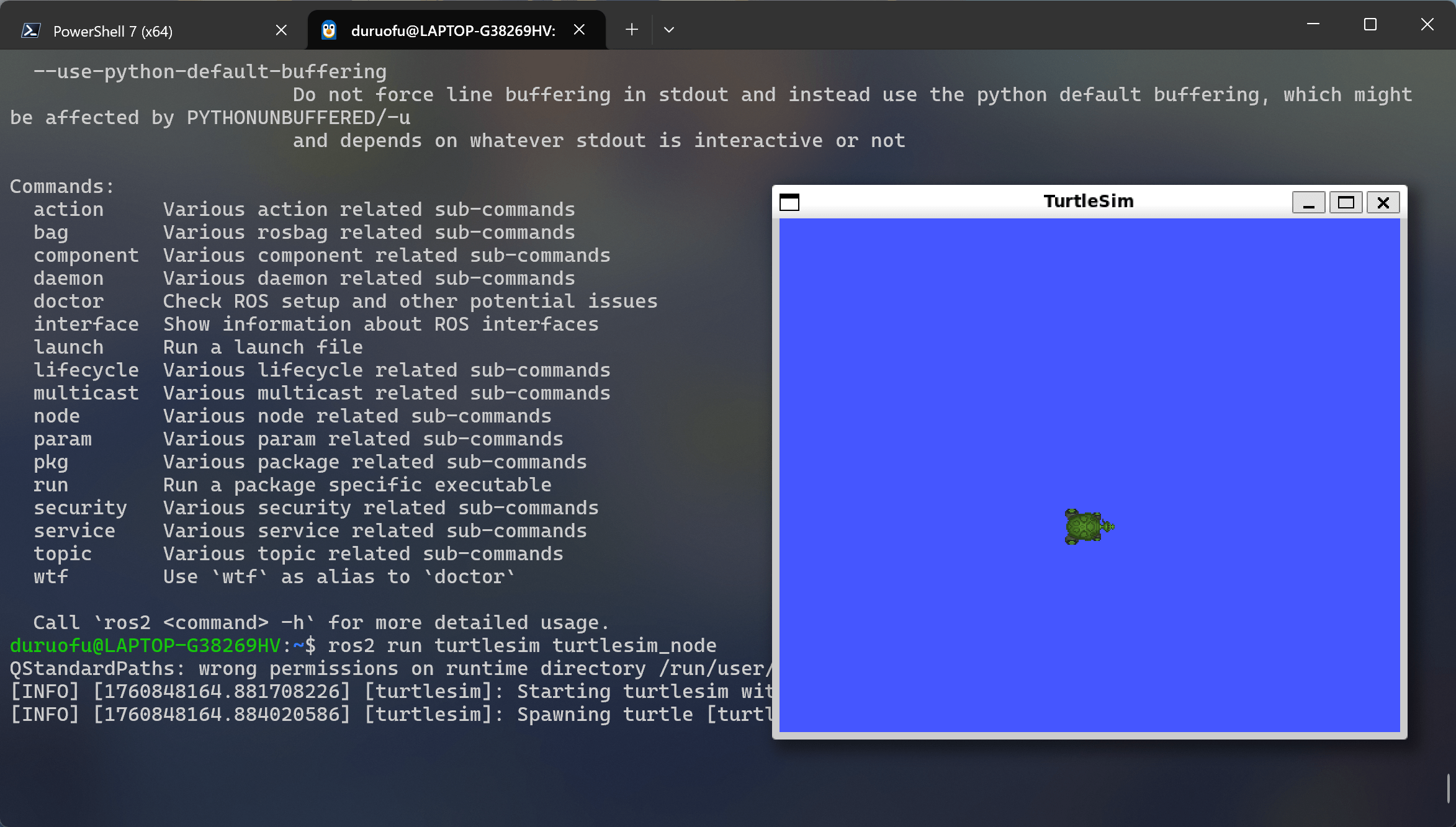
在终端中运行以下命令启动小海龟节点:
bash
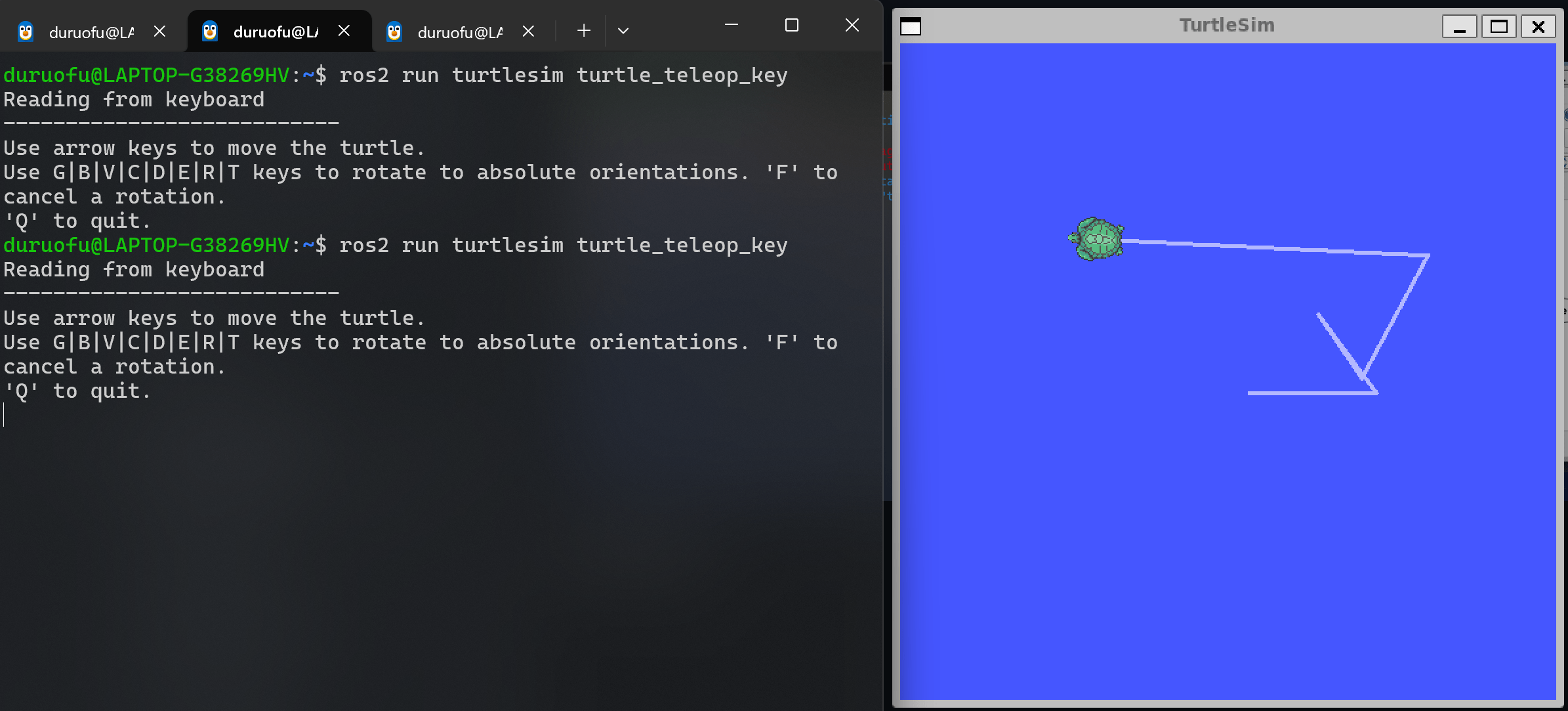
ros2 run turtlesim turtlesim_node弹出下面的界面:
再启动一个新的终端,启动键盘控制节点:
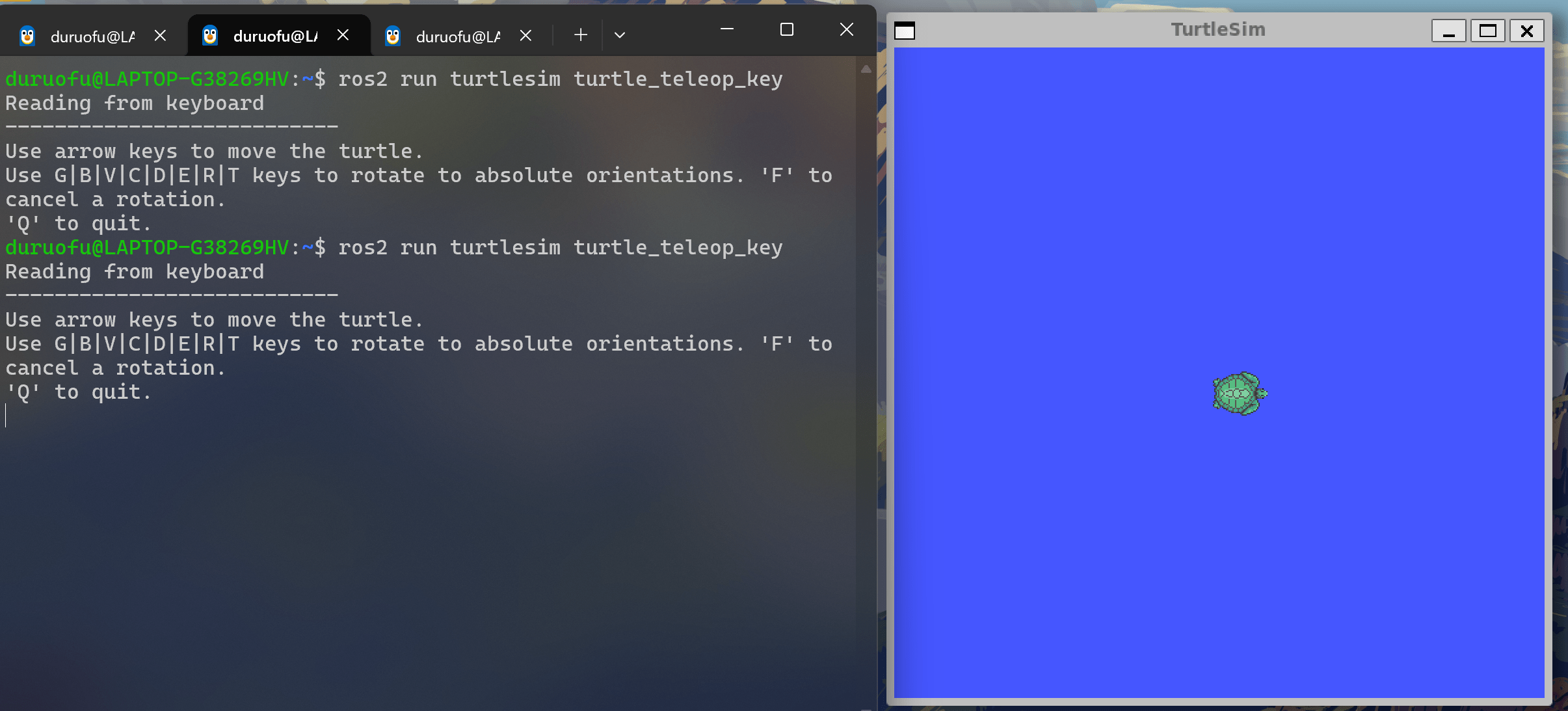
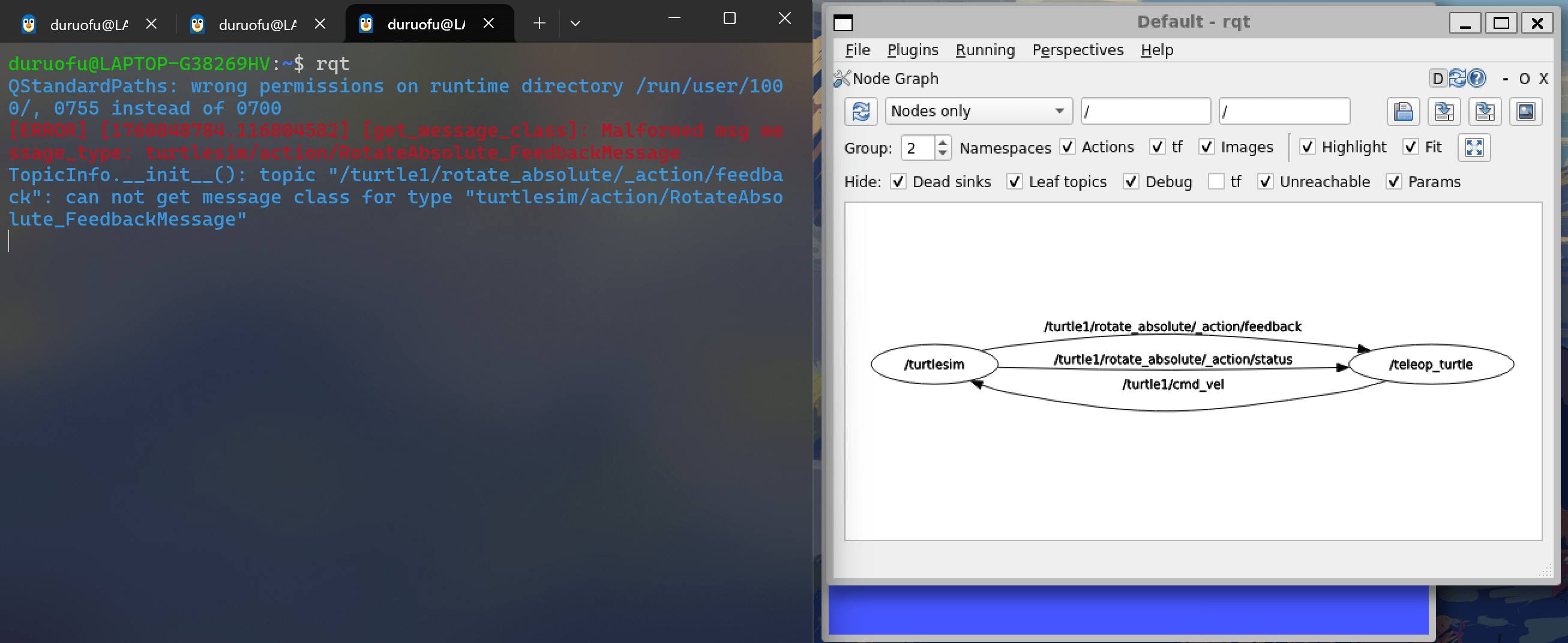
在WSL环境下,可能会出现无法使用键盘控制节点去控制海龟的情况,这应该是某种bug,可以通过打开rqt 软件刷新node graph就能正常控制了。
在rqt里刷新node graph:
重新尝试控制:
到此为止我们就完成了环境的安装,至于后续要使用的其他仿真模块,比如Gazebo仿真器,我们后续使用到的时候在进行安装。